通用AI盒子算法配置指南
本文档适用于,购买了LE-V(适用型号:B012和B015)系列主机,部署了视觉AI模型之后,关于摄像头与算法任务配置的指南说明。
一,使用前提说明
首先感谢您使用阿里云边缘计算视觉AI一体机,请在做视觉算法配置前,确认如下步骤已经完成:
前置条件 | 判断依据 | 特殊处理 |
|---|---|---|
确认型号 | 在主机外包装标签,确认 LE-V-B012或LE-V-B015 适用本文档 | |
主机激活(必须) | 在边缘计算控制台→主机管理中,可以查看到主机且在线 | 如没有主机,请先完成激活 |
AI推理应用预装(必须) | 在边缘计算控制台→应用管理中,有AIBox-INTEL-INT开头的应用,正常运行 | 应用为出厂预装,如果没有当前应用:
|
摄像头设备添加(必须) | 在边缘计算控制台→终端设备管理中,添加摄像头设备 | |
算法模型已添加(必须) | 以上步骤完成后,在边缘计算控制台→算法任务管理中,查看是否有算法服务 | 如果没有算法服务,请联系阿里的业务接口人 |
注:边缘计算控制台地址:https://iotedge.console.aliyun.com/
二,功能介绍
2.1 算法任务配置功能

请在页首,通过下拉菜单,切换不同的主机进行配置管理
算法最大任务数:当前这台主机,所能开启的最大任务数量
算法任务数:当前主机,正在运行的算任务总数。当算法任务数=最大任务数时,则不能新开启更多算法任务。
算法应用,当前服务功能提供4大类算法应用,9个小类的AI算法模型配置,对应关系如下,请根据要使用的算法模型功能,在对应的应用中完成配置:
算法应用 | 算法模型 |
|---|---|
人脸识别 | 人脸识别 |
客流统计 | 客流统计 |
目标检测 | 重点区域占用 |
人群聚集 | |
消防通道占用 | |
安全帽检测 | |
疑似火焰检测 | |
离岗检测 | |
车辆车牌 | 道闸车牌检测 |
算法服务:通用性质的基础服务
事件中心---所有的AI分析事件汇总,提供按照时间/点位等条件检测全部AI事件
底库管理---人脸识别算法必须,提供人脸识别的底库上传/查看/修改/删除等
检索服务---提供人脸/人体/车辆等结构化条件的检索服务
2.2,算法预加载
B012和B015产品,采用ARM嵌入式架构设计,适用视觉推理芯片完成视觉计算,所以在配置算法之前,需要先设置计算芯片预加载的算法类型。
其中B012有4个计算单元,B015有2个计算单元,需要先为每个计算单元,配置加载不同的算法模型。
 当选择的主机,型号为B012或者B015时,清点击最大任务处的设置按钮,进入算法预计在的配置服务。没有完成算法预加载配置,无法进行算法任务的管理和配置。
当选择的主机,型号为B012或者B015时,清点击最大任务处的设置按钮,进入算法预计在的配置服务。没有完成算法预加载配置,无法进行算法任务的管理和配置。
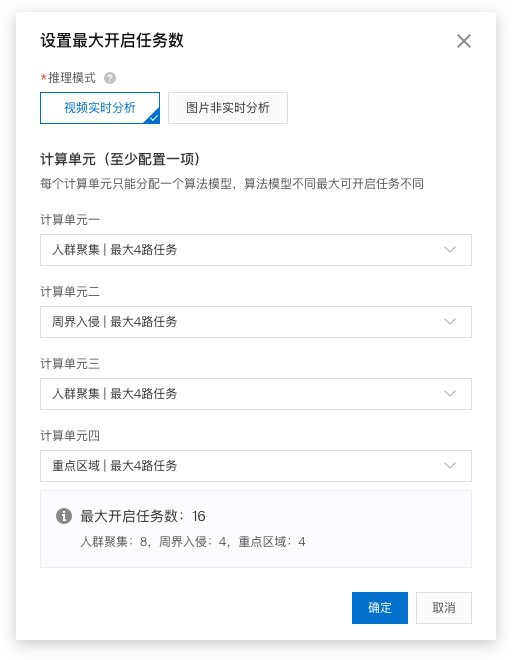 在弹出框,可以进行算法预加载的设置,包括:
在弹出框,可以进行算法预加载的设置,包括:
推理模式支持“视频推理”和“图片推理”两种模式:视频推理适用在高频次计算场景,最低计算频率为每秒2帧。图片推理适用在低频检测场景,检测的间隔长,相对应的图片推理可以配置更多的算法任务;
请为每个计算单元预加载算法,每个算法都会标注单计算单元最大可开启的任务数量,多个计算单元最大任务数量相加,为整机最大可开启任务数;
实例如图:4个计算单元分配设置3类算法,那整机的最大开启路数为16,每个算法可开启的任务数与算法模型加载了几个计算单元相关。
预加载了模型之后,可开始算法任务的配置。
注:计算单元的修改,必须要删除全部对应的算法任务才可以修改。例如上图配置,期望修改重点区域为其他模型,则需要删除已经添加的全部区域入侵的算法任务才可以修改。
注:修改推理模式,需要删除本机全部已有的算法任务,才可以修改。
三,人脸识别应用配置指南
人脸识别算法,适用在被动/无感的人脸识别场景中,例如主要出入口的重点人群管控等场景。
人脸识别算法配套的算法配置服务,功能介绍
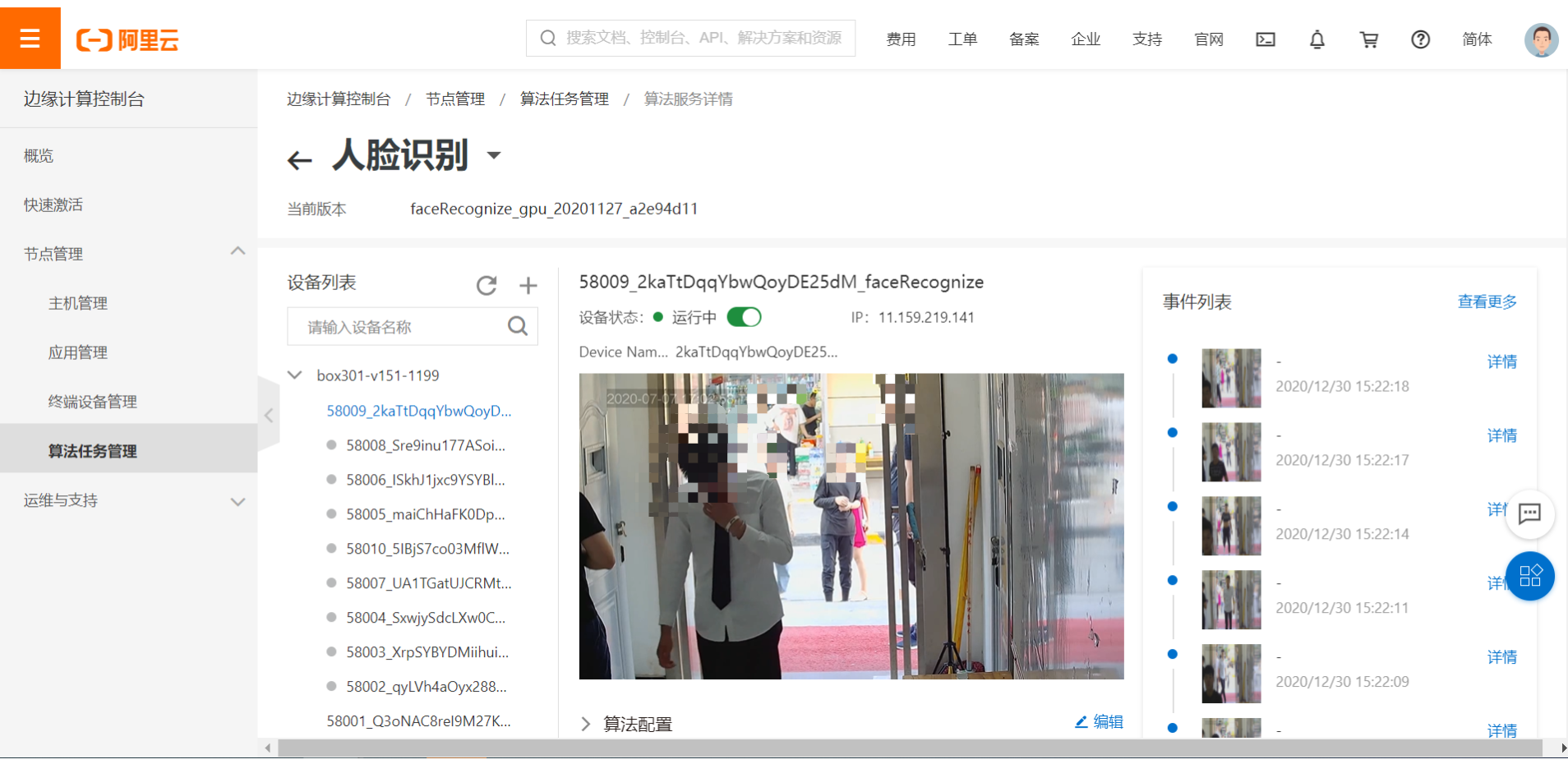
页面中:
可以点击左侧设备列表来管理,添加和选择摄像头设备,在实时画面区域,选择是否开启算法任务。
每开启一个任务,消耗一个当前主机可开启任务的份额。
算法任务开启之后,会有初始化的过程,如长时间任务未正常运行,可以尝试刷新当前画面。目前左侧识别结果不会自动刷新,请点击更多查看全部识别结果,或者刷新页面查看最新。
算法配置,建议无特殊情况无需更改,当前配置已经经过调优。如有特殊需求可以联系阿里云售后服务。
底库管理
您可以为当前主机增加人脸识别底库,底库增加在算法任务管理→底库管理中
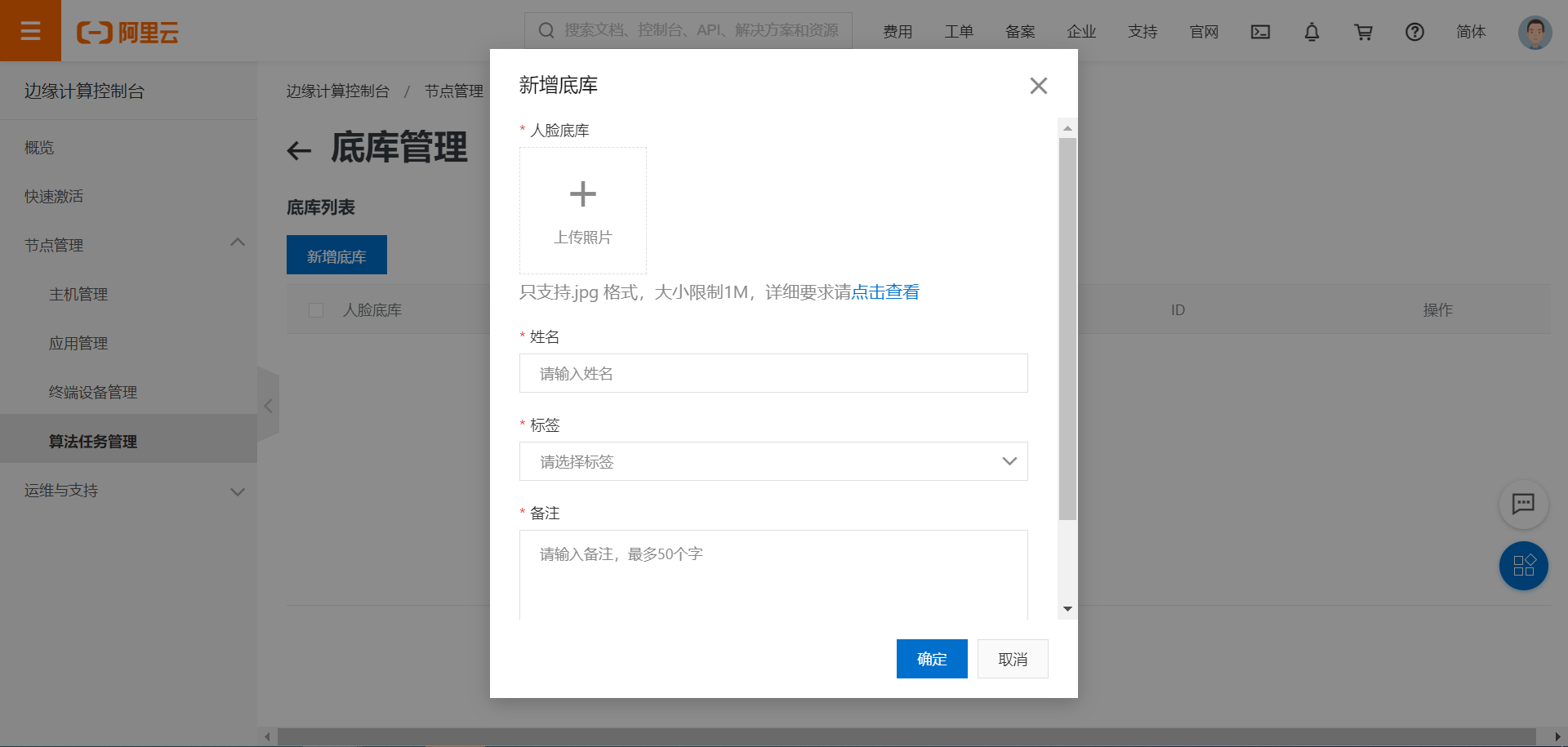
您可以在底库管理页面增删改当前主机的人脸底库,同时可以为底库名称或者设定黑白名单标签。所有设定的信息,标签,在上报的事件中均会附带。
四,通用目标检测服务配置
通用目标检测目前包含7个原子算法模型,包括离岗检测/消防通道/重点区域占用/人群聚集/垃圾检测/区域入侵/安全帽检测。
通用目标检测服务,支持得原子算法基本功能均为设定检测目标,并展示检测结果,以下用人群聚集原子算法模型得配置示例:

可以点击左侧设备列表来管理,添加和选择摄像头设备,并开启任务(同人脸识别)。同时需要设置画面中的检测区域,点击绘制区域:
每开启一个任务,消耗一个当前主机可开启任务的份额。
算法任务开启之后,会有初始化的过程,如长时间任务未正常运行,可以尝试刷新当前画面。目前左侧识别结果不会自动刷新,请点击更多查看全部识别结果,或者刷新页面查看最新。

可在弹框的实时画面中,绘制矩形或多边形,绘制完成点击确认保存。已经绘制的区域,点击刷新可以重置。一路视频一个算法任务,支持画一个检测区域。
绘制或者更改了检测区域后,当前任务需要再次开启,才可以生效。
通用目标检测服务,部分原子算法需要配置检测区域才可生效,如果不需要绘制区域的算法,任务开启后即可执行。对应关系:
算法模型 | 是否需要绘制检测区域 |
|---|---|
人群聚集 | 需要 |
离岗检测 | 需要 |
消防通道占用 | 需要 |
重点区域占用 | 需要 |
区域入侵 | 需要 |
垃圾检测 | 不需要 |
安全帽检测 | 不需要 |
算法配置,建议无特殊情况无需更改,当前配置已经经过调优。如有特殊需求可以联系阿里云售后服务。
五,客流统计算法应用
客流统计算法服务,适用在主要出入口/通道,实现通过检测人头/人体,来统计当前经过的人次(不支持统计绝对人数)。
服务配置指南:

客流统计服务中,可以点击左侧设备列表来管理,添加和选择摄像头设备。在实时画面预览中,选择是否开启当前任务。
每开启一个任务,消耗一个当前主机可开启任务的份额。
算法任务开启之后,会有初始化的过程,如长时间任务未正常运行,可以尝试刷新当前画面。目前左侧识别结果不会自动刷新,请点击更多查看全部识别结果,或者刷新页面查看最新。
客流统计算法,需要为当前画面设置绊线以及方向,来为算法指定检测的范围和方向。请点击算法配置部分的绘制绊线。
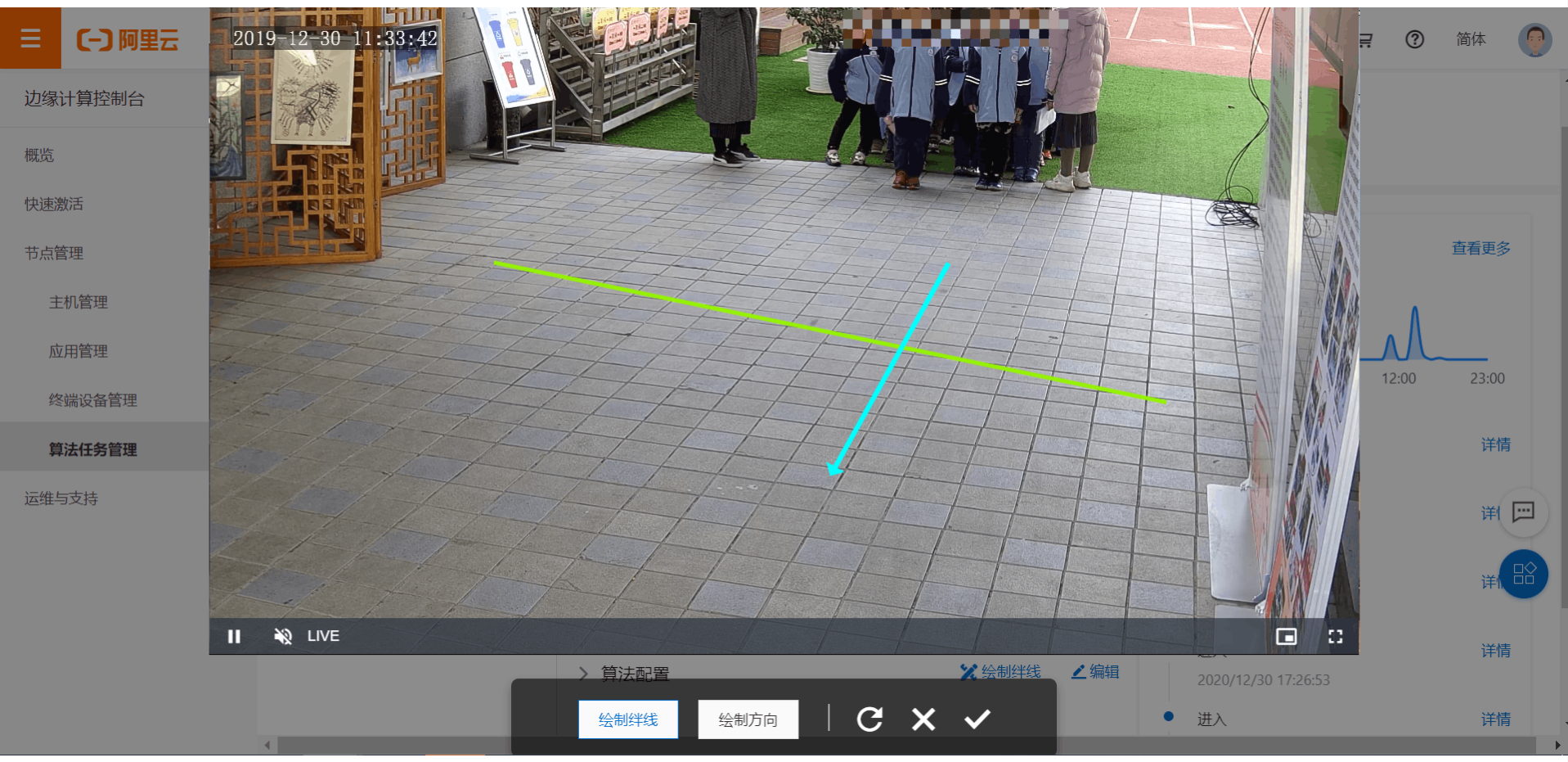
在当前画面中,首先绘制一条绊线,其次绘制检测方向。来设置人流的统计分界线与检测方向:
注:绊线最好与需要统计的客流防线垂直,方向最好与绊线垂直。例如要统计人经过当前通道,则绿色绊线为检测分界线,蓝色为方向。
绘制完成保存当前记录,或者点击刷新重置。重新保存或者新创建的配置,当前运行中的任务需要重新开启。
客流统计应用右侧为当前统计的结果展示,总人数和曲线图均为自然日的统计,每天0点清零。
- 本页导读 (1)