本文以水箱为研究对象,阐述如何运用AICS的系统模型辨识和DT-MPC功能,将一个单入单出的积分过程控制稳定。
背景介绍
积分环节是流程行业生产中常见的动态过程。积分环节过程的特点是,当过程的所有MV为常数时,过程的CV不会到达一个稳态值,而是会线性增加或者减少,积分环节过程是一个不稳定的过程。因此,设计一个合理的控制器稳定控制积分环节过程就显得尤其重要。工业场景中大多数容器的动态过程都是积分过程,比如水箱、储料仓等。
控制器搭建
在AICS画布中拖入DT-MPC组件,将MV和CV的数据接入相应入参端口。与非积分环节的控制器配置相比,积分环节的控制器配置主要有两点不同。
MPC模型配置
在配置具有积分环节性质的CV的模型时,只需配置该积分环节的差分阶跃响应模型即可。例如在此案例中,MV和CV之间的阶跃响应模型为下图。
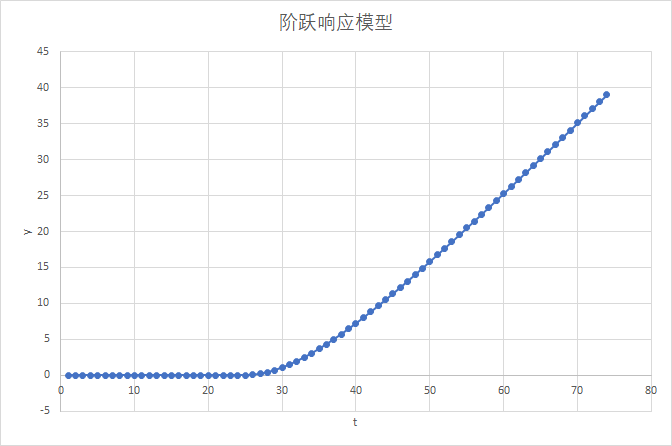
但是在MPC的模型配置中,需要输入的是该模型的差分模型,即下图。
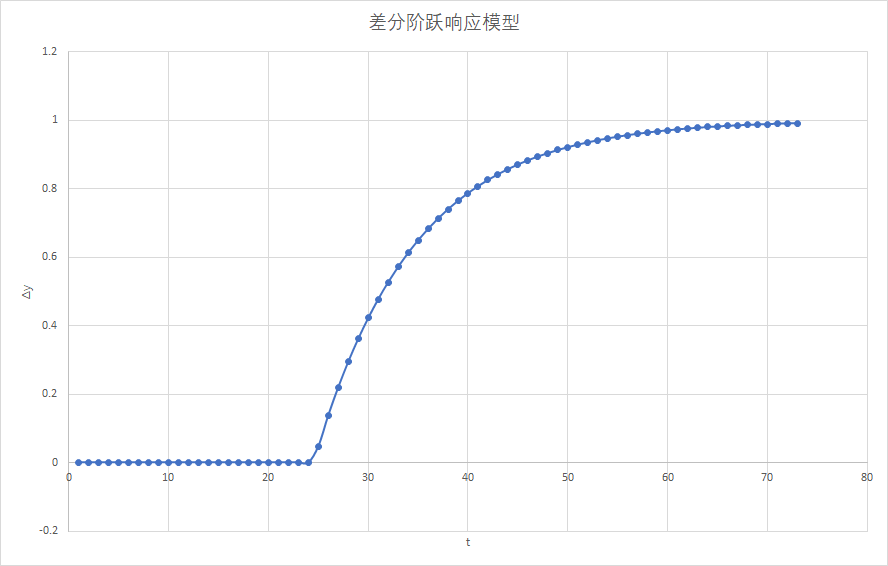
需要注意差分模型的FIR曲线和采样周期(即AICS的画布周期)有关,如果采样周期不同,差分模型的曲线也会不同。上图为采样周期为1秒的时候的差分模型曲线。如果采样周期为5秒,则对应的差分模型FIR曲线为:
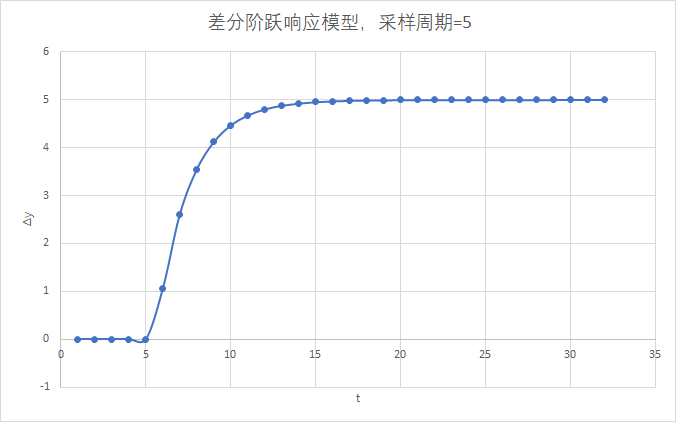
上图的采样周期为5秒,所以在原阶跃模型中,相邻两个采样点的距离变长,两个点的差也相应变大,造成了在采样周期为5秒的情况下,差分阶跃响应模型的增益为5。
CV配置
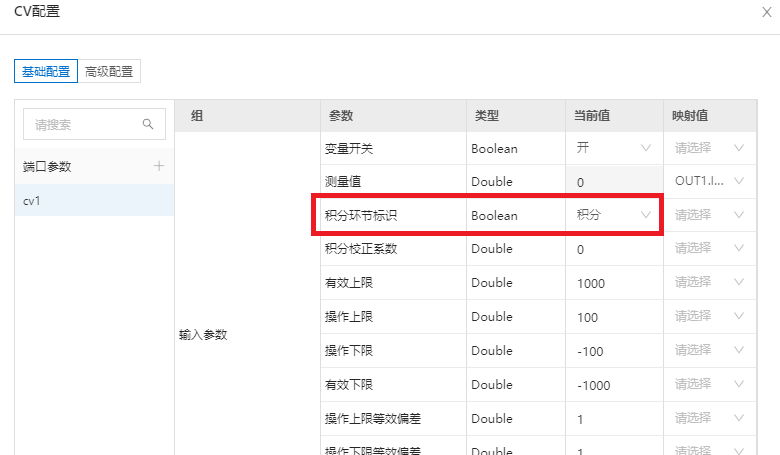
在积分环节控制器的CV配置中,需要将该CV的积分标识选为“积分”。
控制效果展示
下游水箱液位测量值中加入白噪声
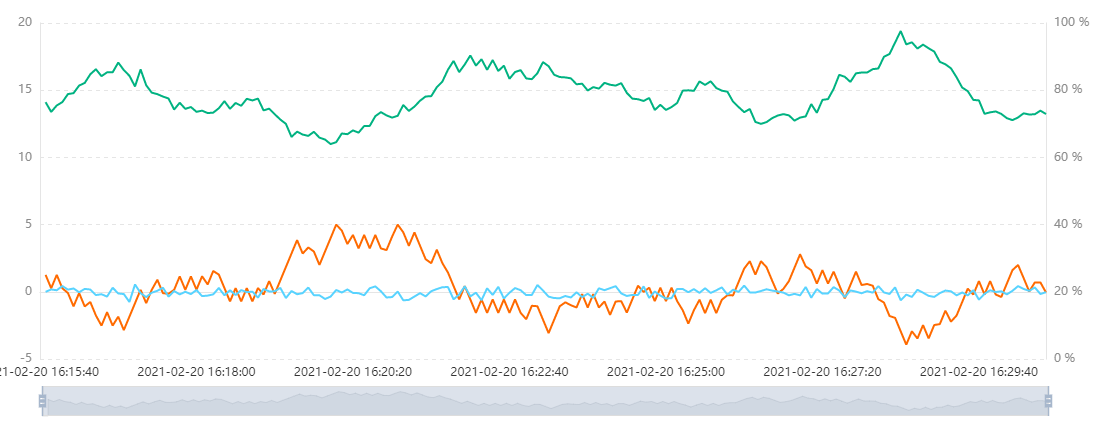
白噪声均值为0,标准差为0.3,下游水箱的液位设定值为15。图中所示绿线为下游水箱液位,红线为上游水箱入水口。
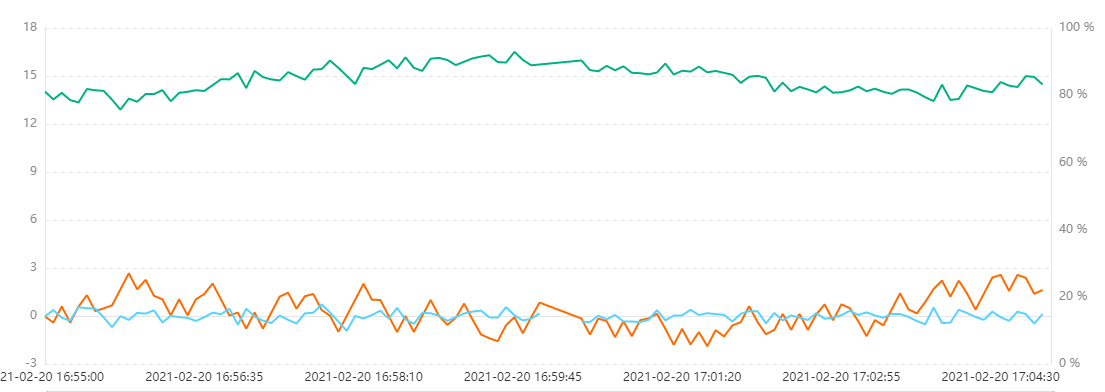
下游水箱第二入水口加入阶跃扰动
阶跃高度为3,均值为0标准差为0.3的白噪声依然存在,下游水箱液位设定值为15。
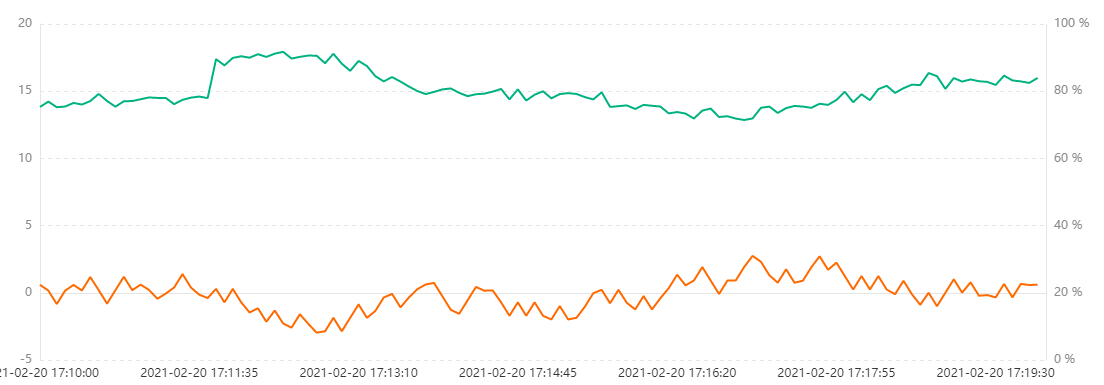
上游水箱第二入水口加入白噪声
上游水箱第二入睡就白噪声均值为0,标准差为0.05。下游水箱液位设定值为15。
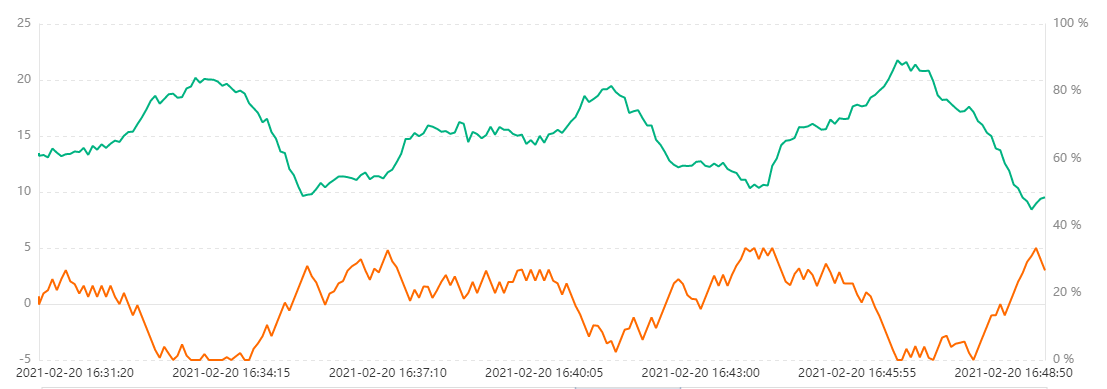
控制器性能调优
如何解决积分CV变量的振荡现象,在此案例中,可以看到,当上游水箱的第二个入水口发生扰动的时候,控制器很难将下游水箱的液位控制在设定值附近。这是因为,上游水箱入水口的白噪声扰动通过上游水箱进入下游水箱之后,变成了一个有积分性质的噪声,这是只假设平移校正的MPC无法处理的。这类现象在积分环节的控制中非常常见,DT-MPC提供了一个解决方案,即积分校正系数。
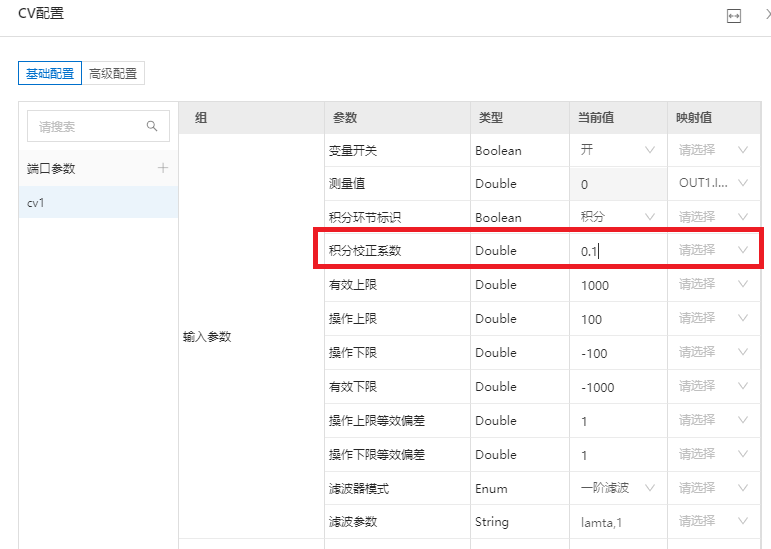
积分校正系数为积分环节控制特有的控制器参数。该系数的取值为[0,1]。该系数的大小决定了控制器在进行模型校正时,预测误差在绝对误差和速率误差上的分配。该系数为0时,误差校正将更偏向于绝对误差;反之,则更偏向于速率误差。在此案例中,上游水箱的扰动到达下游水箱时,变成了一个有积分性质的噪声,影响了下游水箱液位变化的速率。也就是说,我们需要将模型预测误差中的一部分认为是速率误差,即将积分校正系数设置成为一个大于0的数。考虑到速率误差,通常将积分校正系数设置在0.1~0.3的范围内。
在此案例中,我们将积分矫正误差设置为0.1,便可以清晰地看到控制效果的提升。