Gazebo环境下基于ROS和OpenCV的阿克曼小车综合实验(2025版)
本实验是一个综合实验,包括了二维码识别、车道线识别、停车标识识别。
实验室资源方式简介
进入实操前,请确保阿里云账号满足以下条件:
个人账号资源
使用您个人的云资源进行操作,资源归属于个人。
平台仅提供手册参考,不会对资源做任何操作。
确保已完成云工开物300元代金券领取。
已通过实名认证且账户余额≥100元。
本次实验将在您的账号下开通实操所需计算型实例规格族c7a,费用约为:25元(以实验时长2小时预估,具体金额取决于实验完成的时间),需要您通过阿里云云工开物学生专属300元抵扣金兑换本次实操的云资源。
如果您调整了资源规格、使用时长,或执行了本方案以外的操作,可能导致费用发生变化,请以控制台显示的实际价格和最终账单为准。
领取专属权益及创建实验资源
在开始实验之前,请先点击右侧屏幕的“进入实操”再进行后续操作

领取300元高校专属权益优惠券(若已领取请跳过)
实验产生的费用优先使用优惠券,优惠券使用完毕后需您自行承担。

实验步骤
1、服务部署
点击链接,进入部署页面
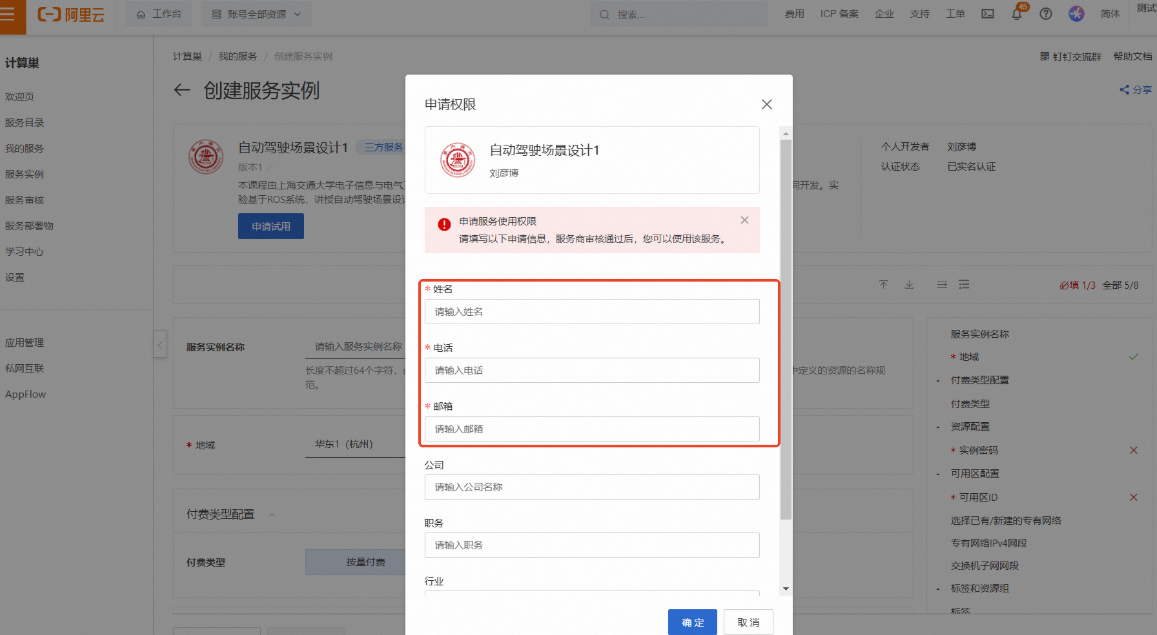
按弹窗提示进行权限申请。其中【姓名】、【电话】、【邮箱】为必填项,完成填写后点击【确定】
说明请填写您的学校邮箱(.edu),便于审核
提交申请后将提示
当申请通过后,将会收到短信提示可以进行部署

刷新部署页面,按下图设置【服务实例名称】、【地域】、【实例密码】
服务实例名称:test(可自定义命名)
地域:华东2(上海)
实例密码:Sjtu@520
说明输入实例密码时请注意大小写,请记住您设置的实例名称及对应密码,后续实验过程会用到。

完成填写后点击【下一步:确认订单】
核对实例信息及价格预览,无误请点击【立即创建】
重要领取300元优惠券后,资源应为0元/小时,且会提示【您当前账户的余额充足】!若提示余额不足等,请检查是否正确领取优惠券
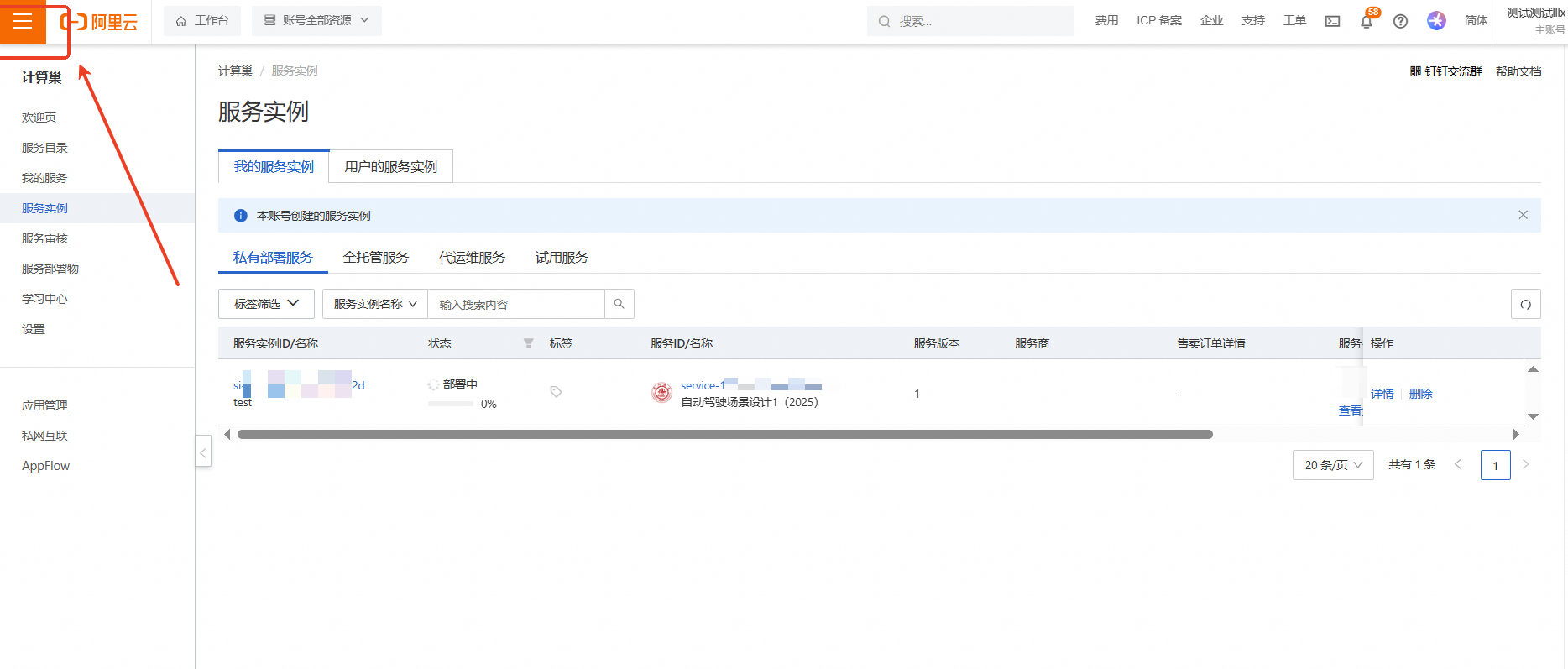
创建成功,点击【去列表查看】
查看实例,点击左侧的图标展开目录
选择目录中的【云服务器ECS】
云服务器ECS—实例—远程连接
下拉展开更多登录方式,选择【通过VNC远程连接】
输入实例密码:Sjtu@520(请输入您设置的密码)后回车
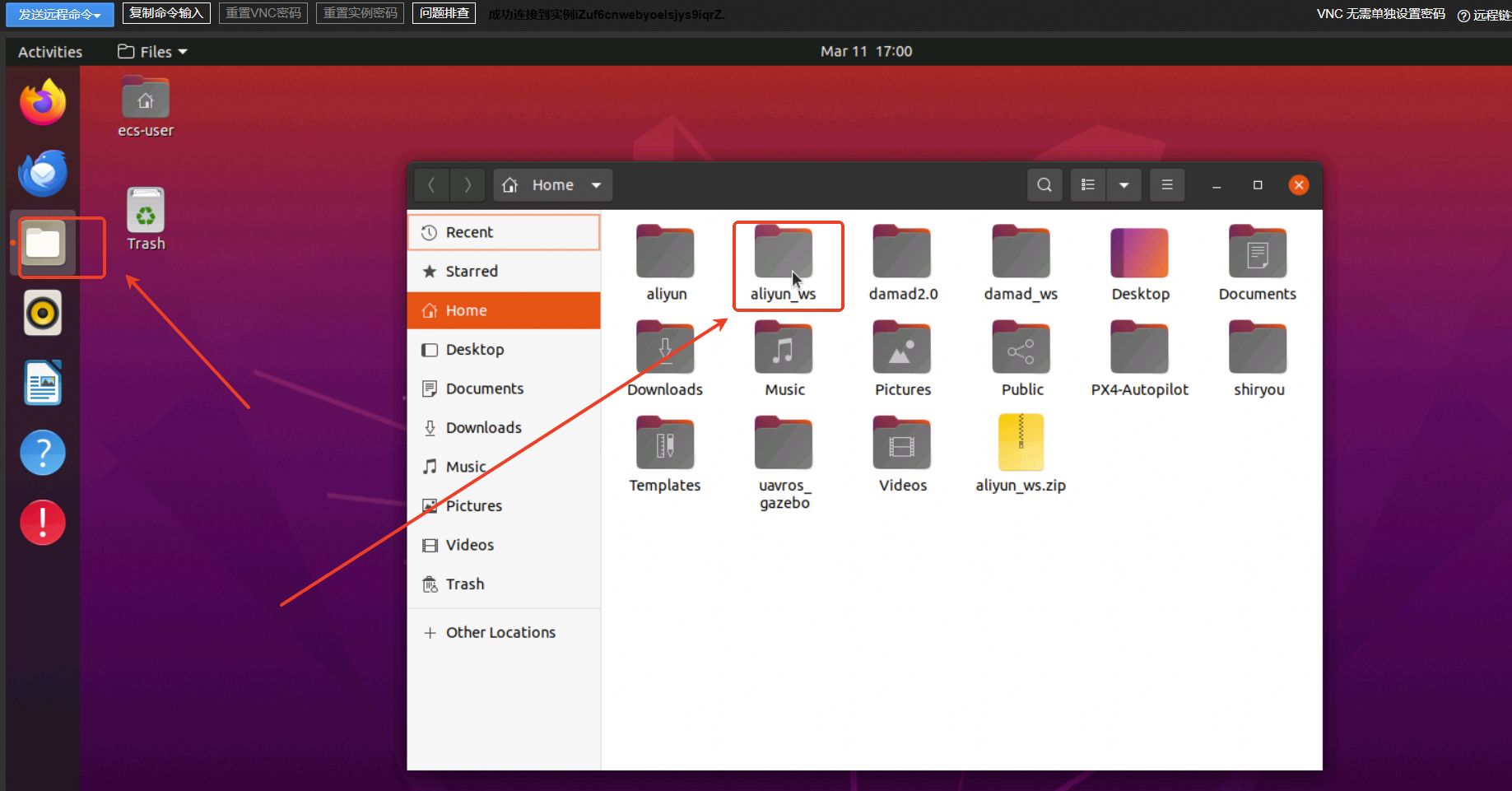
点击左侧第3个图标,点击aliyun_ws文件夹
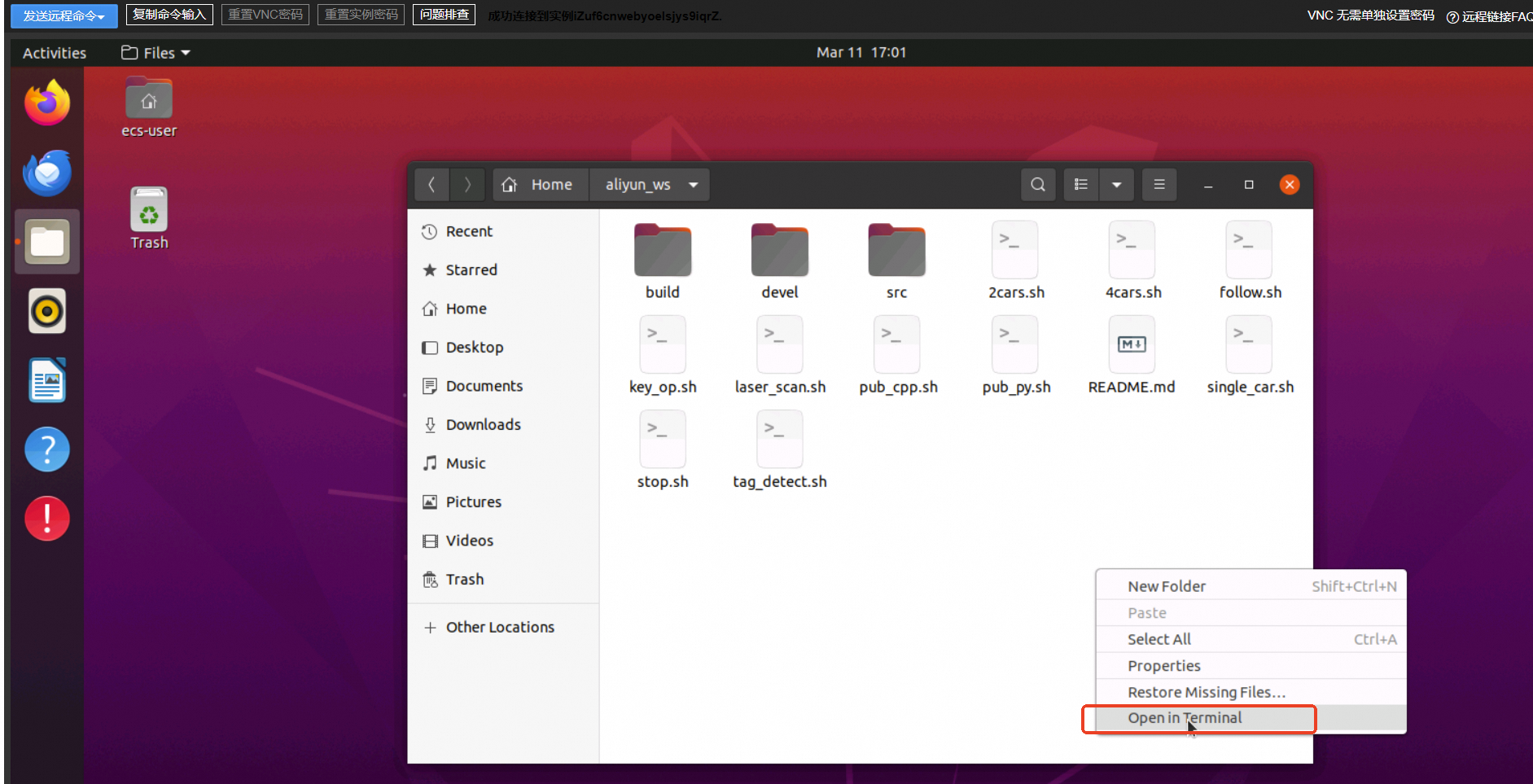
进入aliyun_ws文件夹后,在空白处点击鼠标右键,选择Open in Terminal
2、代码部分
单车综合程序使用的是raceworld_1car场景,由raceworld_1car.launch文件启动。找到aliyun_ws/src/raceworld/launch文件夹中的raceworld_1car.launch文件并打开。
在launch文件内加载了多个控制器,其中left_rear_wheel_velocity_controller, right_rear_wheel_velocity_controller,left_front_wheel_velocity_controller,right_front_wheel_velocity_controller,left_steering_hinge_position_controller和right_steering_hinge_position_controller接收ROS消息,分别控制了左右后轮速度,左右前轮速度和转向角度。
<node name="controller_manager" pkg="controller_manager" type="spawner" respawn="false" output="screen" args="left_rear_wheel_velocity_controller right_rear_wheel_velocity_controller left_front_wheel_velocity_controller right_front_wheel_velocity_controller left_steering_hinge_position_controller right_steering_hinge_position_controller joint_state_controller"/>在加载控制器代码的下面,加载了一个名为servo_comannds.py的代码文件。
<node pkg="raceworld" type="servo_commands.py" name="servo_commands" output="screen" >打开aliyun_ws/src/raceworld/src文件夹中的servo_comannds.py文件我们可以看到,代码中新建了一个名为servo_comannds的节点,他订阅并接收/car1/ackermann_cmd_mux/output消息。
robot_name = "car" def servo_commands(): rospy.init_node('servo_commands', anonymous=True) robot_name = rospy.get_param('~robot_name') rospy.Subscriber("ackermann_cmd_mux/output", AckermannDriveStamped, set_throttle_steer) # spin() simply keeps python from exiting until this node is stopped rospy.spin() if __name__ == '__main__': try: servo_commands() except rospy.ROSInterruptException: pass在接收到消息后,经过适当的转换,将速度和转向信息发布给之前所述六个控制器。
def set_throttle_steer(data): pub_vel_left_rear_wheel = rospy.Publisher("left_rear_wheel_velocity_controller/command", Float64, queue_size=1) pub_vel_right_rear_wheel = rospy.Publisher("right_rear_wheel_velocity_controller/command", Float64, queue_size=1) pub_vel_left_front_wheel = rospy.Publisher("left_front_wheel_velocity_controller/command", Float64, queue_size=1) pub_vel_right_front_wheel = rospy.Publisher("right_front_wheel_velocity_controller/command", Float64, queue_size=1) pub_pos_left_steering_hinge = rospy.Publisher("left_steering_hinge_position_controller/command", Float64, queue_size=1) pub_pos_right_steering_hinge = rospy.Publisher("right_steering_hinge_position_controller/command", Float64, queue_size=1) throttle = data.drive.speed*28 steer = data.drive.steering_angle pub_vel_left_rear_wheel.publish(throttle) pub_vel_right_rear_wheel.publish(throttle) pub_vel_left_front_wheel.publish(throttle) pub_vel_right_front_wheel.publish(throttle) pub_pos_left_steering_hinge.publish(steer) pub_pos_right_steering_hinge.publish(steer)单车综合程序需要运行aliyun_ws/src/raceworld/src文件夹中的single_car.py文件。
在代码中首先新建了get_camera节点,并且订阅了名为/car1/camera/zed_left/image_rect_color_left的消息。该消息通过Gazebo中的小车上的左摄像头获取。在获取到摄像头图像信息后,把它转换为cv2图像数据。
随后订阅/car1/base_pose_ground_truth消息,获取小车初始位置以及可以计算出当前位置和初始位置的距离。
最后订阅红绿灯消息,用来控制小车的停止和行驶。
def image_callback(msg): # 获取图像并开始寻线 global id, pre_id, signal, start_point bridge = cv_bridge.CvBridge() img = bridge.imgmsg_to_cv2(msg, 'bgr8') if get_tag(img): if id != pre_id: pre_id = id change_path() else: pass if signal != 1 and start_point: stop() print("Stop Now") else: follow_line(img) def traffic_light_callback(msg): global signal signal = int(msg.data) def pose_callback(msg): global init_pos, start_point if init_pos is None: init_pos = msg.pose.pose.position start_point = True else: distance = ((msg.pose.pose.position.x - init_pos.x) ** 2 + (msg.pose.pose.position.y - init_pos.y) ** 2 + (msg.pose.pose.position.z - init_pos.z) ** 2) ** 0.5 if distance < 0.6: start_point = True else: start_point = False if __name__ == '__main__': signal = -1 #交通灯信号 start_point = False #是否位于初始位置附近 init_pos = None #初始位置 rospy.init_node("single_car") pub = rospy.Publisher("/car1/ackermann_cmd_mux/output", AckermannDriveStamped, queue_size=10) rospy.Subscriber("/car1/camera/zed_left/image_rect_color_left", Image, image_callback) rospy.Subscriber("/car1/base_pose_ground_truth", Odometry, pose_callback) rospy.Subscriber("traffic_light", String, traffic_light_callback) rospy.spin() pass以follow_line_in函数为例,先对图像进行HSV转换和二值图转换操作。
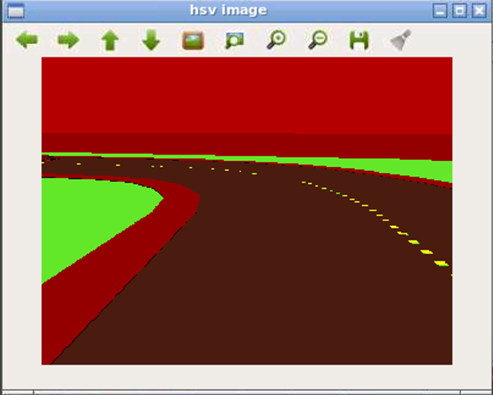
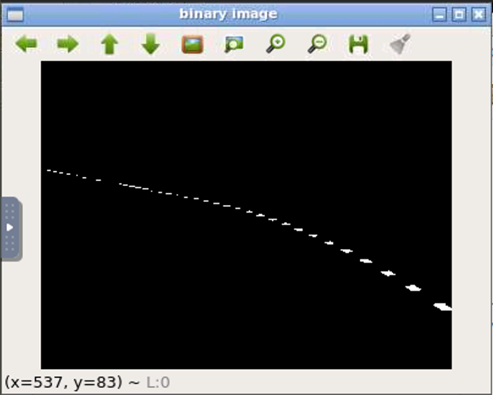
def follow_line_in(image): global pub print("内道") kernel = np.ones((7,7), np.uint8) #转换为HSV图像 hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV) lower_yellow = np.array([26, 43, 46]) lower_yellow = np.array([26, 43, 0]) upper_yellow = np.array([34, 255, 255]) #对车道线图像二值化 mask1 = cv2.inRange(hsv, lower_yellow, upper_yellow) h, w = mask1.shapeHSV图如下所示。
二值图如下所示。
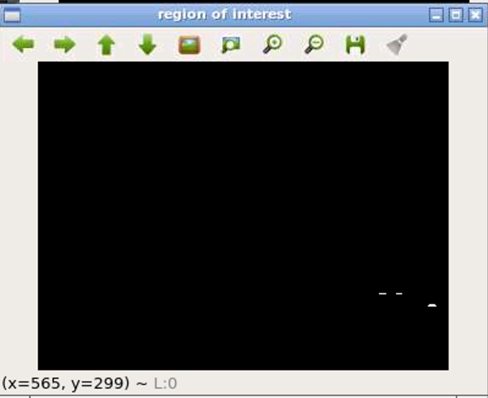
接着进行膨胀操作,并分别设置车道线和车道边界的感兴趣区域(ROI)。
#膨胀操作 mask1 = cv2.dilate(mask1, kernel, 2) #设置感兴趣区域ROI mask1 = set_roi_forward1(h, w, mask1) lower_gray = np.array([0, 0, 120]) upper_gray = np.array([0, 0, 200]) #对车道边界二值化 mask2 = cv2.inRange(hsv, lower_gray, upper_gray) #膨胀操作 mask2 = cv2.dilate(mask2, kernel, 2) #设置感兴趣区域ROI mask2 = set_roi_forward2(h, w, mask2) #cv2.namedWindow("mask1",0) #cv2.imshow("mask1", mask1) #cv2.namedWindow("mask2",0) #cv2.imshow("mask2", mask2)ROI图像如下所示。可以看到感兴趣区域只显示小车镜头前的一部份区域。
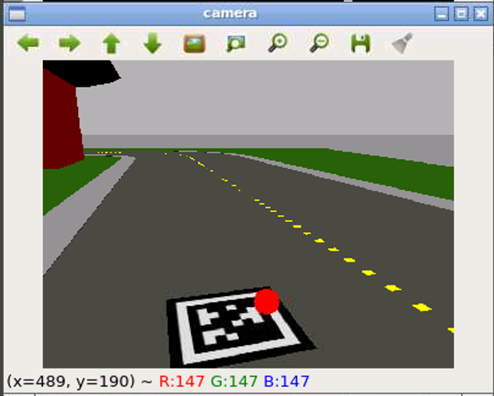
接着调用cv2.moments函数获得图像的矩并计算质心,根据质心与图像中线的偏移设置转角,并设置速度。
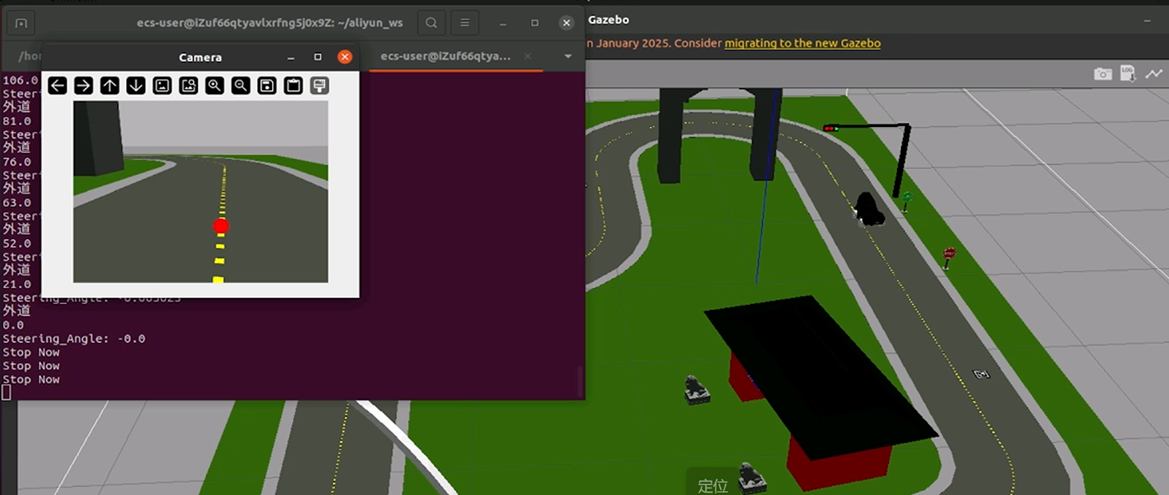
#获得图像矩 M1 = cv2.moments(mask1) M2 = cv2.moments(mask2) cx1 = 0 cx2 = 0 cy = 0 if M1['m00'] > 0: cx1 = int(M1['m10'] / M1['m00']) cy = int(M1['m01'] / M1['m00']) if M2['m00'] > 0: cx2 = int(M2['m10'] / M2['m00']) cx = int((cx1 + cx2) / 2) #在质心画圆 cv2.circle(image, (cx, cy), 20, (0, 0, 255), -1) #cv2.circle(image, (int(w / 2 - 60), cy), 10, (255, 0, 0), -1) err = cx - (w / 2 - 60) print(err) #angle = min(max(-1, -float(err / 2.0) / 20), 1) angle = min(max(-1, -float(err / 5.0) / 50), 1) akm = AckermannDriveStamped() akm.drive.speed = 0.06 #print("Speed:",akm.drive.speed) akm.drive.steering_angle = angle print("Steering_Angle:",akm.drive.steering_angle) pub.publish(akm) cv2.namedWindow("Camera",0) cv2.imshow("Camera", image) cv2.waitKey(1)同时以质心为中心点在原始图像上绘制红色的圆形图案作为参考,如图所示。
当小车接近初始位置init_pos以及红绿灯信号signal≠1时,停止行驶等待中间信号绿灯。
if signal != 1 and start_point: stop() print("Stop Now") else: follow_line(img)def stop(): global pub akm = AckermannDriveStamped() akm.drive.speed = 0 akm.drive.steering_angle = 0 for i in range(20): pub.publish(akm) time.sleep(2)同时调用opencv的detect函数识别地面上的二维码,当获取到的二维码ID与当前ID不同时,小车开始变道行驶。
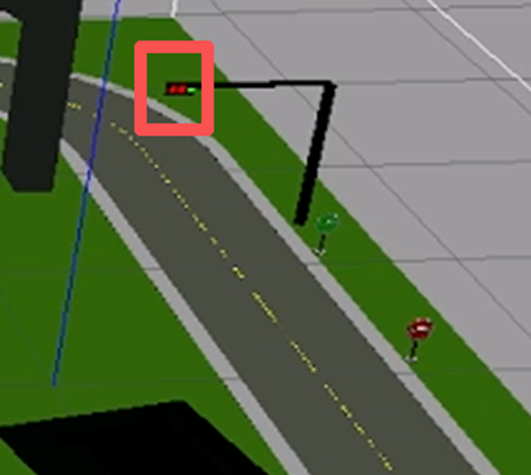
if get_tag(img): if id != pre_id: pre_id = id change_path() else: pass#换道 def change_path(): global path if path == 0: path = 1 else: path = 0#读取二维码 def get_tag(frame): global id detector = pyapriltags.Detector() gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) tags = detector.detect(gray) if tags == []: return False else: for tag in tags: print("Tag detected with id: ", tag.tag_id) id = tag.tag_id return True红绿灯ROS消息的发送和模型的变化由aliyun_ws/src/raceworld/src/traffic_light.py实现。
if __name__ == '__main__': changeRate = 8 currentSignal = 0 #0左 1中 2右 lastTime = time.time() rospy.init_node("traffic_light") pub = rospy.Publisher("traffic_light", String,queue_size=1) # 等待并调用gazebo中get_link_state和set_link_state服务 rospy.wait_for_service('/gazebo/get_link_state') rospy.wait_for_service('/gazebo/set_link_state') get_link_state_proxy= rospy.ServiceProxy('/gazebo/get_link_state', GetLinkState) set_link_state_proxy = rospy.ServiceProxy('/gazebo/set_link_state', SetLinkState) reference_frame = 'world' rate = rospy.Rate(10) while not rospy.is_shutdown(): traffic_light_signal() #signal = "1" #rospy.loginfo("Current Traffic Light is "+signal) #pub.publish(signal) rate.sleep()changeRate为信号变化的频率,每隔一定时间通过traffic_light消息的发布者发布当前信号灯消息。
#定时切换左中右信号 def traffic_light_signal(): global currentSignal, lastTime if time.time() - lastTime >= changeRate: traffic_light_change(currentSignal) currentSignal = (currentSignal + 1) % 3 traffic_light_change(currentSignal) lastTime = time.time() pub.publish(str(currentSignal)) rospy.loginfo("Current Traffic Light is " + str(currentSignal))通过GetLinkState获得模型link的位置,使用SetLinkState将红灯和绿灯link位置交换达到红绿灯变化的效果。
#改模型红绿灯位置 #切换信号时先把之前信号模型调换复原再修改新的信号灯 def traffic_light_change(signal): # 根据当前信号选择需要修改的link名 if signal == 0: link_name0 = 'cantilevered_light::traffic_light::left_off' link_name1 = 'cantilevered_light::traffic_light::left_on' elif signal == 1: link_name0 = 'cantilevered_light::traffic_light::middle_off' link_name1 = 'cantilevered_light::traffic_light::middle_on' elif signal == 2: link_name0 = 'cantilevered_light::traffic_light::right_off' link_name1 = 'cantilevered_light::traffic_light::right_on' # 获取左/中/右的红绿灯模型link state current_state0 = get_link_state_proxy(link_name0, reference_frame) link_state0 = LinkState() link_state0.link_name = link_name0 current_state1 = get_link_state_proxy(link_name1, reference_frame) link_state1 = LinkState() link_state1.link_name = link_name1 # 调换左/中/右的红绿灯模型 link_state0.pose = current_state1.link_state.pose link_state0.twist = current_state0.link_state.twist link_state0.reference_frame = reference_frame set_link_state_proxy(link_state0) link_state1.pose = current_state0.link_state.pose link_state1.twist = current_state1.link_state.twist link_state1.reference_frame = reference_frame set_link_state_proxy(link_state1)3、实验操作
在aliyun_ws路径下新建终端,输入命令开启raceworld_1car Gazebo场景。
source devel/setup.bash roslaunch raceworld raceworld_1car.launch在aliyun_ws路径下新建另一个终端并输入如下命令启动信号灯程序。
source devel/setup.bash roslaunch raceworld traffic_light.launch终端中会显示当前信号,并且信号灯模型也会相应改变。
在aliyun_ws路径下新建另一个终端并输入如下命令启动小车。
source devel/setup.bash rosrun raceworld single_car.py当小车处于初始位置一段距离内(信号灯前方)并且信号灯中间不为绿灯时(信号≠1),小车停止并等待信号灯切换。









清理资源
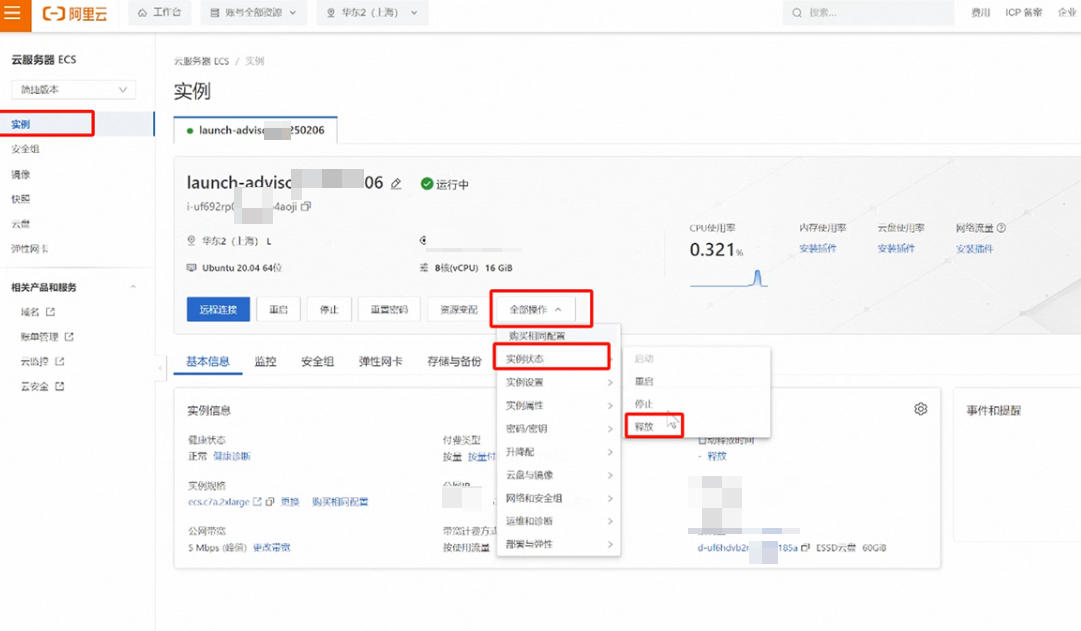
在云服务器ECS界面选择实例——全部操作——实例状态——释放
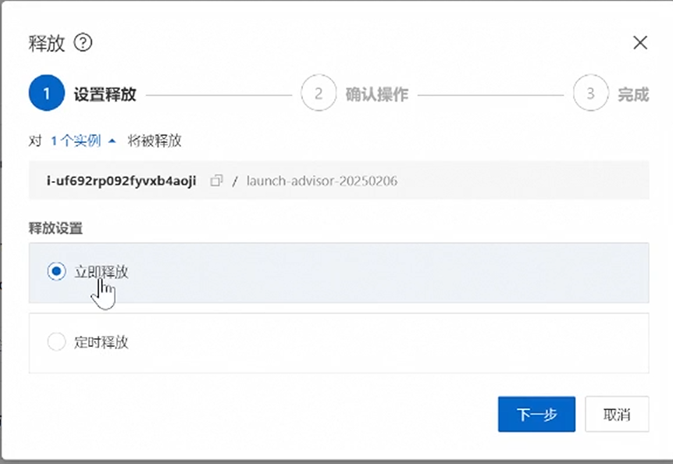
选择立即释放。
确认选项。
进行安全验证后成功释放实例。

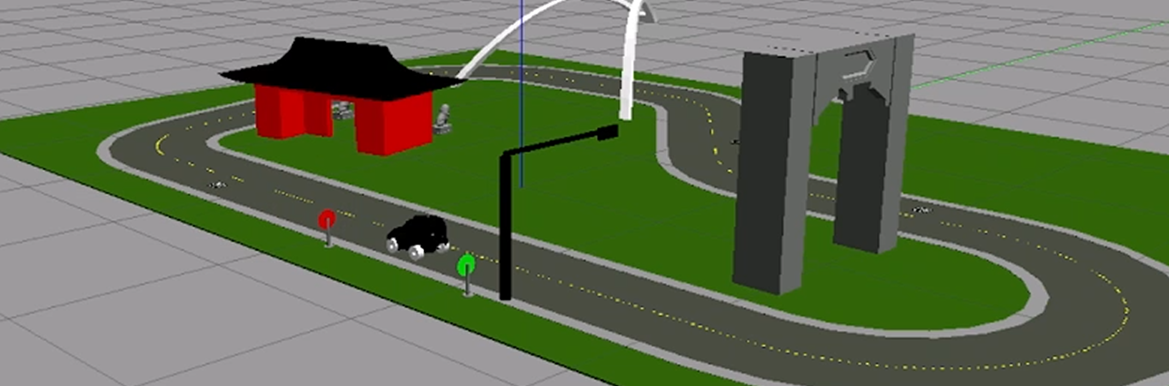
场景简介
本实验是一个综合实验,包括了二维码识别、车道线识别、停车标识识别。
背景知识
学生需要有一定的C++ 基础或者Python基础来完成此实验。
关闭实验
在完成实验后,点击 结束实操
点击 取消 回到实验页面,点击 确定 跳转实验评分
请为本次实验评分,并给出您的建议,点击 确认,结束本次实验