
本文为您介绍如何使用ROS在线编辑器编写模板。ROS在线编辑器可以为您提供自动补全模板内容、预览模板参数和预览模板架构图的功能。
前提条件
操作步骤
- 登录资源编排控制台。
- 在左侧导航栏,选择模板>我的模板。
- 在我的模板页面,单击创建模板。
在创建模板页面,编辑ROS模板内容。
您可以通过ROS模板编辑器或Terraform模板编辑器编辑模板内容。
ROS模板编辑器
ROS模板编辑器支持脚本编辑和可视化编辑两种模式。
脚本编辑(JSON/YAML模板编辑)
脚本编辑支持自动补全模板内容、提示参数等功能。
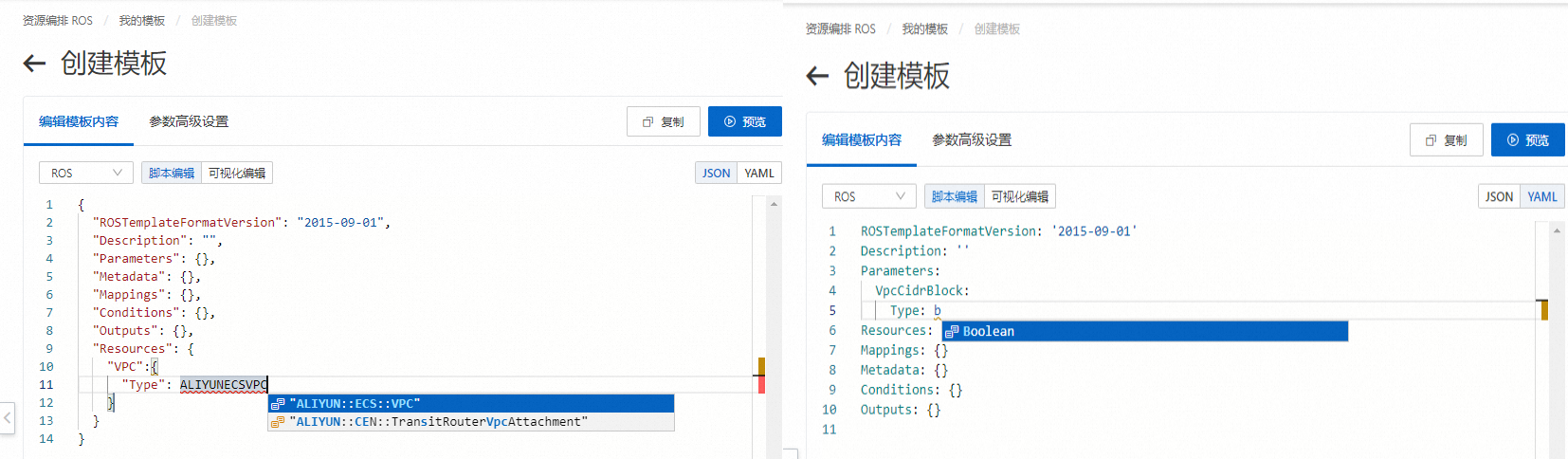
资源类型与参数类型智能提示
当您在定义ROS模板的资源信息(Resources)与参数信息(Parameters)时,ROS模板编辑器可以快速准确的提示您需要的资源类型和参数类型。
资源属性智能提示
当您在定义ROS模板的资源信息(Resources)时,ROS模板编辑器可以快速准确地提示您需要定义的资源属性(Properties)。

引用智能提示
当您在定义ROS模板的资源(Resources)、输出(Outputs)、映射(Mappings)、条件(Conditions)和元数据(Metadata)信息时,ROS模板编辑器可以使用
Ref函数对参数、资源ID或伪参数进行提示。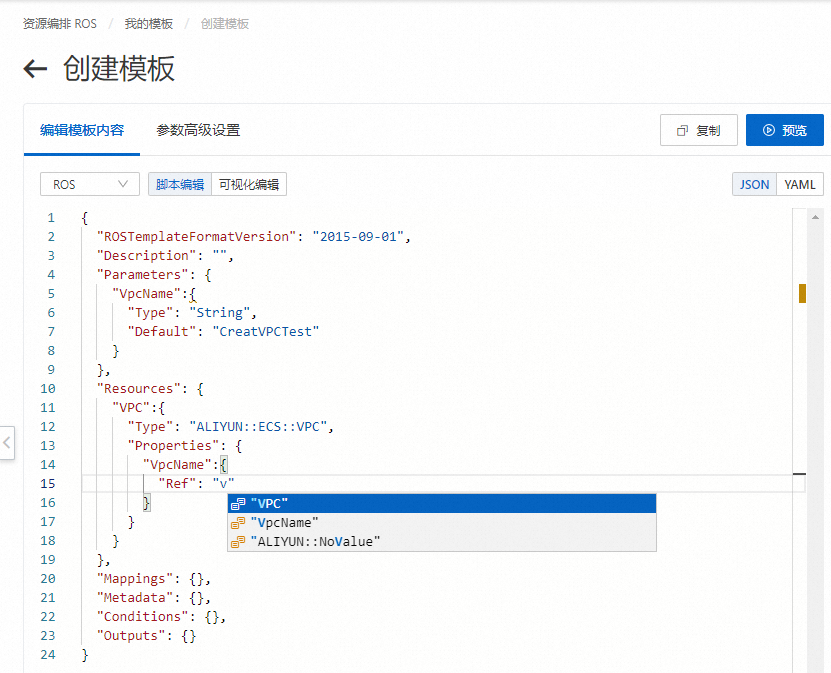
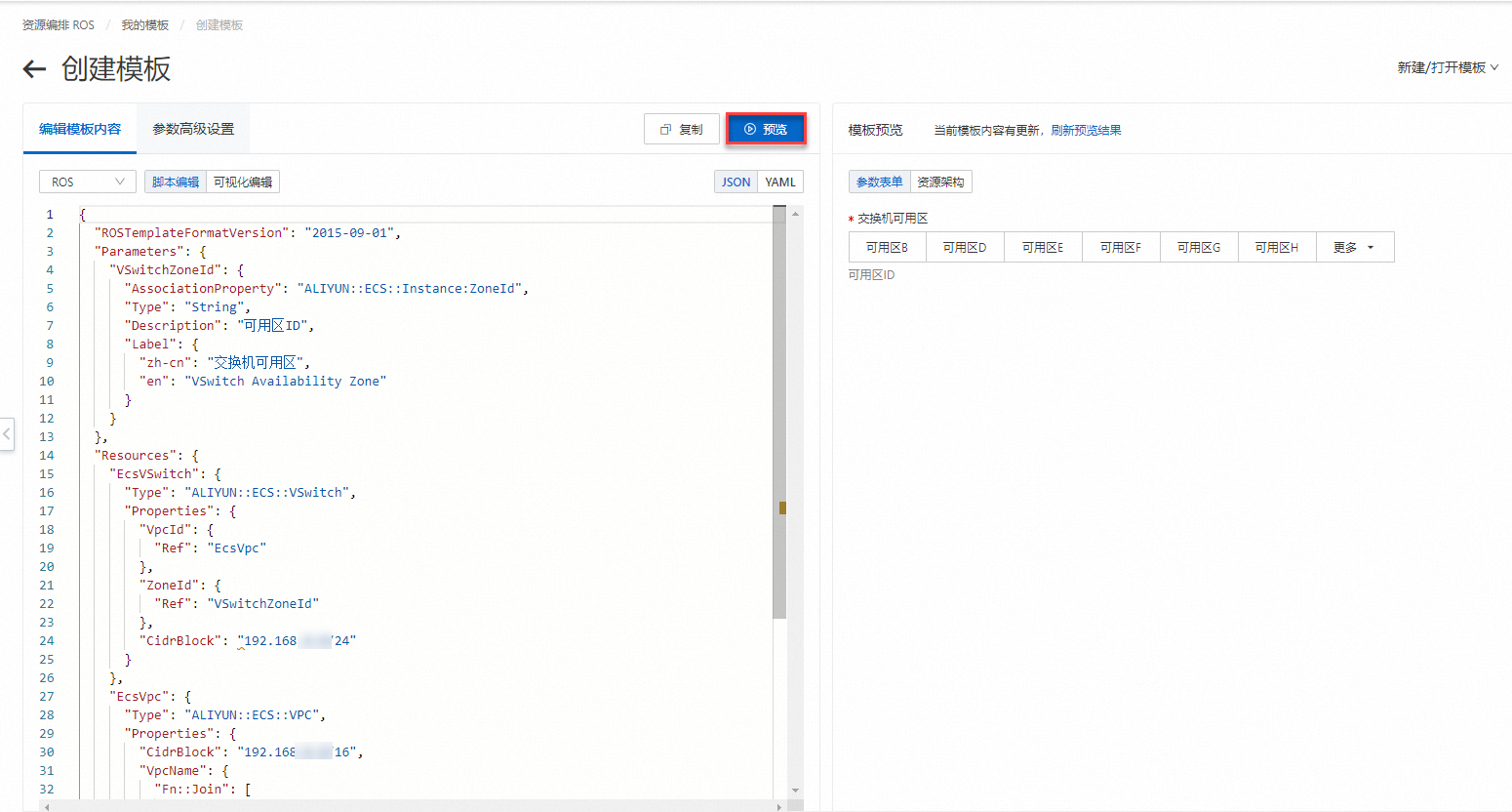
参数信息的映射预览
当您完成ROS模板定义后,可以单击编辑模板内容右上角的预览按钮查看模板预览效果,从而完善模板参数的信息。
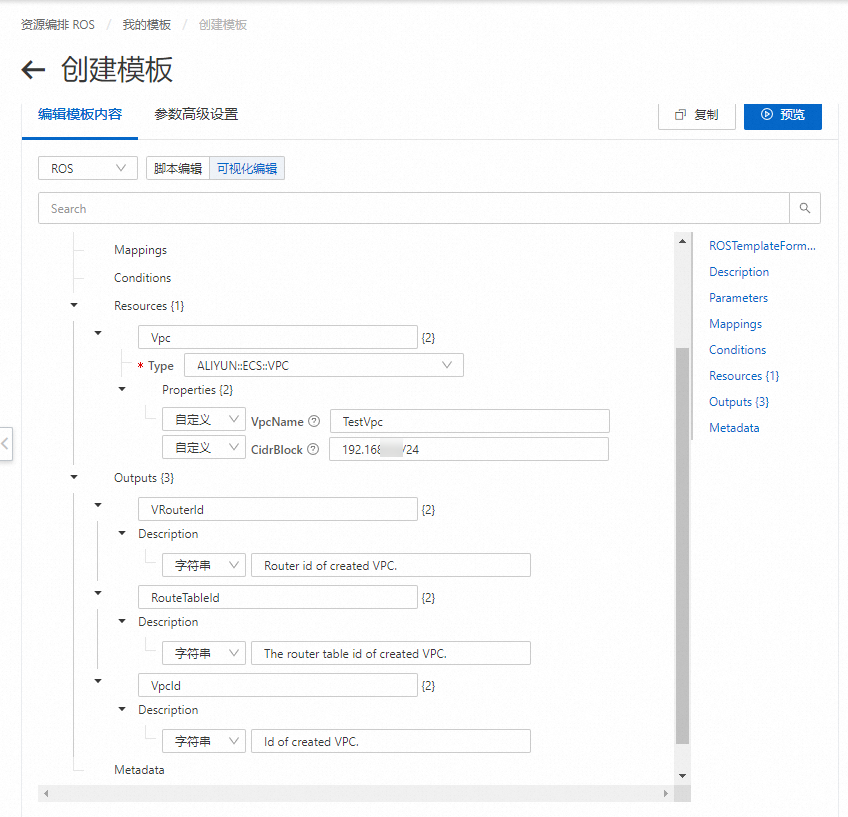
可视化编辑
可视化编辑支持下拉选择、文本输入等功能。
编辑器提供通过可视化编辑界面手动编辑信息,从而定义生成对应的ROS模板。您可以通过可视化模板编辑树进行更新或删除模板参数、资源、元数据和输出等操作。
Terraform模板编辑器
Terraform模板的导入与编辑
您可以在Terraform编辑器中通过打开一个本地文件夹来导入一个已有的Terraform项目。
Terraform模板和ROS模板的相互转换
当您完成Terraform定义并将Terraform模板切换为ROS模板后,Terraform模板会被转换为ROS托管Terraform后支持的模板格式。
