
计算三维地理网格路径。
语法
geomgrid[] ST_3DGridPath(geometry start, geometry end, box3d range, gridcost[] barriers, params text default '');参数
参数名称 | 描述 |
start | 起始点。 |
end | 终止点。 |
range | 路径规划范围。 |
barriers | 所有障碍物的网格开销。 |
params | 计算参数。 |
params支持的参数及取值为:
algorithm:寻路算法
dij:DIjkstra算法。
astar(默认):A*算法。
nb_astar:新双向A*算法。
movement:移动方式
cross(默认):只允许向相邻网格移动。
octothorpe:向相邻网格及对角网格移动。
strict_octothorpe:在相邻网格可通行时可向对角网格移动。
distance:距离估算方式
euclidean:欧几里得距离。
manhattan(默认):曼哈顿距离。
chebyshev:切比雪夫距离。
例如:{"algorithm":"astar","movement":"strict_octothorpe"}。
说明
params设置为空,或者部分参数未设置时,系统会自动使用默认值。
描述
根据给定的数据计算网格路径。
起始点和终止点是3维点数据,其中的z值可以不精确,算法会自动找到合适的z值并进行路径规划。
range是路径规划的范围,通常以dsm数据为基础进行设定。
barriers综合了所有的障碍物开销,通常是采用ST_CostUnion的结果。
当params置为空时,默认采用aster、cross和manhattan设置。计算结果为按起止顺序排列好的geomgrid数组。
示例
select st_astext(ST_3DGridPath(st_geomfromewkt('srid=4490;POINT Z (1 1 1)'), st_geomfromewkt('srid=4490;POINT Z (5 6 3)'),
'BOX3D(0 0 0,10 10 10)'::box3d, st_costunion(array[st_setcost(array[st_gridfromtext('GZ0000000001')],1), st_setcost(array[st_gridfromtext('GZ0000000000')],5)])));
--------------------------------------------------------------------------------
{GZ0000000006,GZ0000000042,GZ0000000046,GZ0000000064,GZ0000000420,GZ0000000422,
GZ0000000426,GZ0000000604,GZ0000000640,GZ0000000644,GZ0000004200,GZ0000004240,
GZ0000004244,GZ0000004600,GZ0000004602,GZ0000004620,GZ0000004622,GZ0000006400,
GZ0000006420}
select ST_3DGridPath(st_geomfromewkt('srid=4490;POINT Z (1 1 1)'), st_geomfromewkt('srid=4490;POINT Z (5 6 3)'),
'BOX3D(0 0 0,10 10 10)'::box3d, st_costunion(array[st_setcost(array[st_gridfromtext('GZ0000000001')],1), st_setcost(array[st_gridfromtext('GZ0000000000')],5)]), '{"algorithm":"astar","movement":"strict_octothorpe","distance":"euclidean"}');
--------------------------------------------------------------------------------
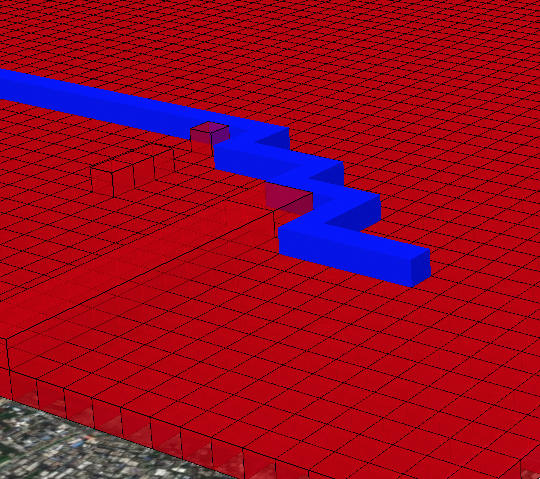
{GZ0000000006,GZ0000000060,GZ0000000066,GZ0000000600,GZ0000000606,GZ0000000660,
GZ0000000666,GZ0000006000,GZ0000006040,GZ0000006044,GZ0000006420}三维路径示意图
该文章对您有帮助吗?