TwinFabric支持五种不同的摄影机与控制器模式,以满足运行态不同的查看场景方式,本文介绍如何使用摄像机查看场景对象。
前提条件
已登录DataV-TwinFabric控制台。
已进入场景编辑器页面。
固定机位摄像机
应用场景
在场景中放置一个固定的摄像机点位,在需要时可以使用这个点位来查看场景。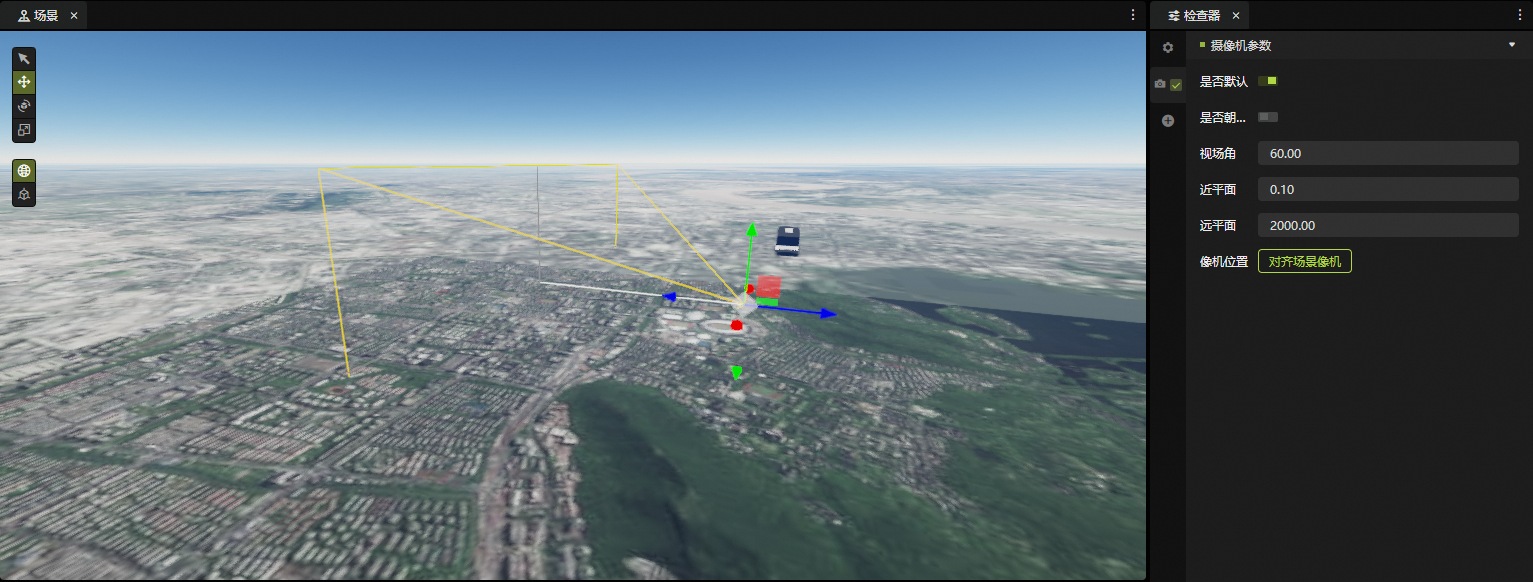
参数配置
属性 | 功能说明 |
是否默认 | 是否作为运行态默认相机。 |
是否朝向一致 | 相机的朝向是否与所附着的孪生体实例朝向一致,如果不一致,则朝向会与所附着的孪生体实例朝向相反。 |
视场角 | 透视投影的视场角,单位是角度。 |
近裁剪面 | 透视投影的近裁剪面,单位是米。 |
远裁剪面 | 透视投影的远裁剪面,单位是米。 |
像机位置 | 提供了快捷设置相机参数的方式,使相机获得与当前编辑器场景相同的点位视角。 |
第一人称摄像机
应用场景
第一人称摄像机可以通过操作鼠标键盘在场景中自由移动。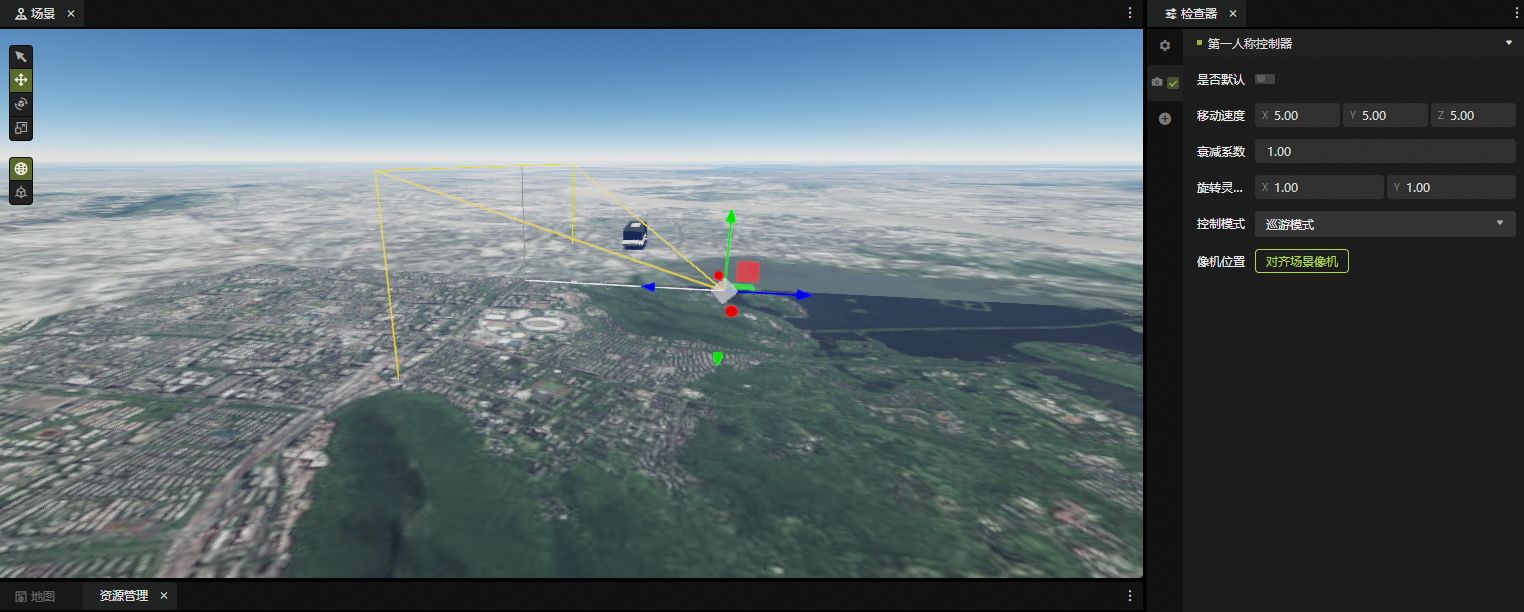
参数配置
属性 | 功能说明 |
是否默认 | 是否作为运行态默认相机。 |
移动速度 | 设置相机的移动速度。 |
衰减系数 | 设置衰减系数可以改变转动朝向后相机从旋转到停下来的衰减速度。 |
旋转灵敏度 | 设置旋转灵敏度可以改变鼠标操控的旋转灵敏度 |
控制模式 | 设置相机的控制模式。
|
像机位置 | 提供了快捷设置相机参数的方式,使相机获得与当前编辑器场景相同的点位视角。 |

键盘操作
键盘 | W | S | A | D | E(巡游模式) | Q(巡游模式) |
行为 | 前进 | 后退 | 左移 | 右移 | 升高 | 降低 |
聚焦摄像机
应用场景
聚焦摄像机能够让相机围绕空间中的某点或者某个孪生体实例旋转,目前支持曲线轨道和定点微动两种聚焦方式。
参数配置
属性 | 功能说明 |
是否默认 | 设置当前摄像机位置是否为默认位置。 |
目标类型 | 设置当前摄像机的目标类型,包括对象和位置。 |
目标位置/对象 | 设置当前摄像机的目标对象和目标位置。 |
移动方式 | 设置当前摄像机的移动方式,包括单次、循环和往复。 |
轨道类型 | 设置当前摄像机的轨道类型,包括定点微动和曲线轨道。 |
周期 | 设置当前摄像机的轨道周期。 |
高度 | 设置当前摄像机的定点高度。 |
半径 | 设置当前摄像机的半径。 |
角度 | 设置当前摄像机的角度。 |
视场角 | 设置当前摄像机的视场角。 |
水平振幅 | 设置当前摄像机的水平振幅。 |
垂直振幅 | 设置当前摄像机的垂直振幅。 |
相机位置 | 单击起点对齐场景相机,将当前摄像机的位置对齐场景窗口的起点位置。 |
高度 | 设置当前摄像机的高度。 |
半径 | 设置当前摄像机的半径。 |
角度 | 设置当前摄像机的角度。 |
视场角 | 设置当前摄像机的视场角。 |
相机位置 | 单击终点对齐场景相机,将当前摄像机的位置对齐场景窗口的起点位置。 |
高度 | 设置当前摄像机的高度。 |
半径 | 设置当前摄像机的半径。 |
角度 | 设置当前摄像机的角度。 |
视场角 | 设置当前摄像机的视场角。 |
聚焦方式
曲线轨道
让相机围绕汽车旋转,蓝色曲线展示了相机的运动轨迹。
用户需要设置好如下参数:
曲线定义
旋转中心目标点:空间中的某点或者某个孪生体实例。
曲线起点:(可以通过快捷方式设定)
以高度、半径、角度来定义相对旋转中心点的偏移。
视场角:定义起点视场角。
曲线终点:(可以通过快捷方式设定)
以高度、半径、角度来定义相对旋转中心点的偏移。
视场角:定义终点视场角。
移动方式
单次:相机按照曲线运动一次就停止在曲线终点。
循环:相机按照曲线运动完之后,回到曲线重新开始运动。

往复:相机从曲线起点运动到曲线终点,再从曲线终点运动到起点,以此往复。
运动周期:从曲线起点运动到终点的时长,单位是秒。

定点微动
让相机围绕汽车做轻微扰动,蓝色为扰动的曲线示意,可以理解为用户拿着一个自拍杆,自拍杆近端在用户手上,远端绑定摄像机,用户手的位置不变,上下左右转动自拍杆。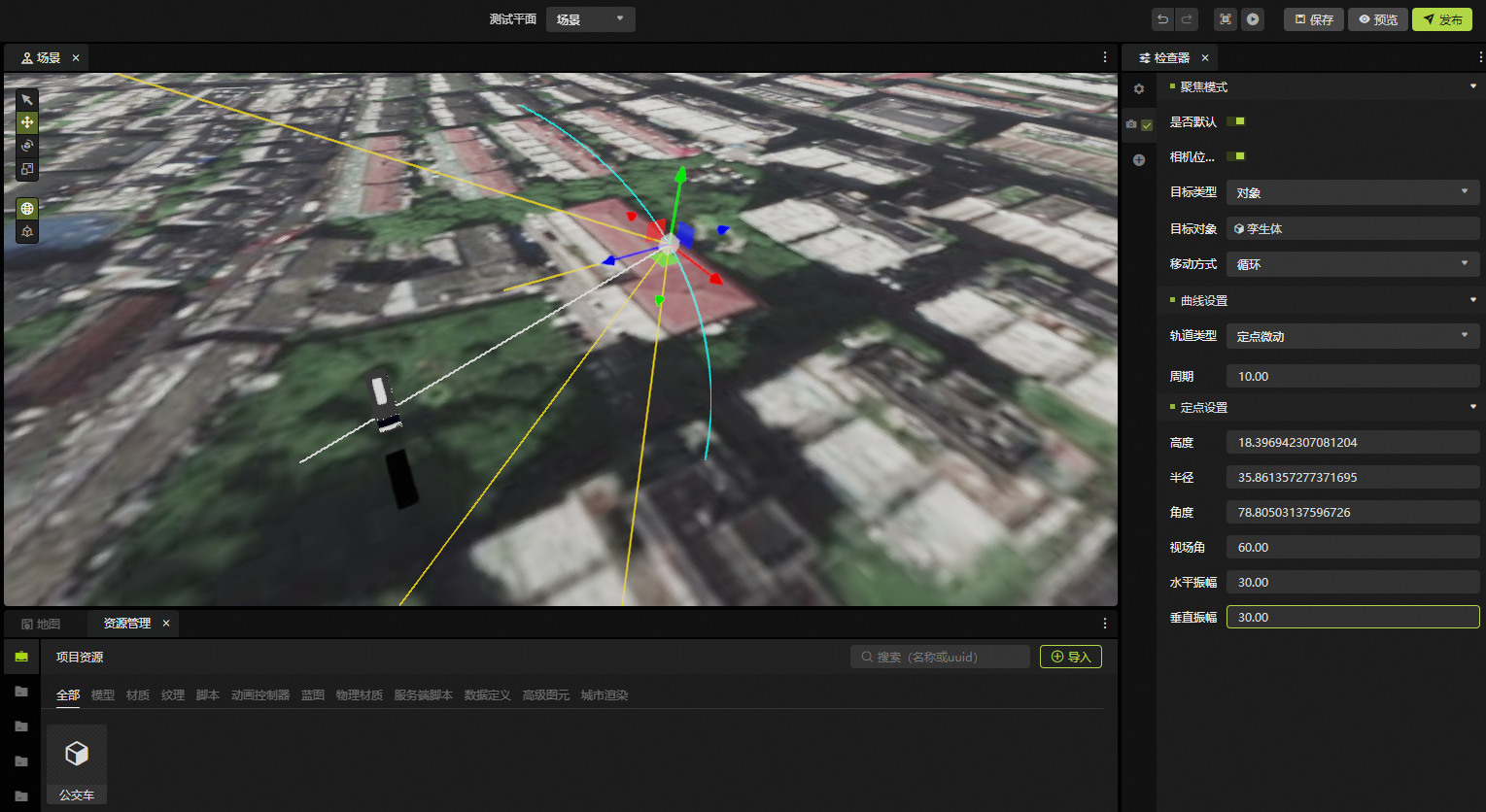
用户需要设置好如下参数:
曲线定义
旋转中心目标点:空间中的某点或者某个孪生体实例。
定点设置:以高度、半径、角度来定义相对旋转中心点的偏移。
视场角:定义视场角。
水平振幅:指水平转动幅度,单位是角度。
垂直振度:指垂直转动幅度,单位是角度。
移动方式
单次:相机按照曲线运动一次就停止在曲线终点。
循环:相机按照曲线运动完之后,回到曲线重新开始运动。
往复:相机从曲线起点运动到曲线终点,再从曲线终点运动到起点,以此往复。
运动周期:从曲线起点运动到终点的时长,单位是秒。
自由视角控制摄像机
应用场景
自由视角控制摄像机中使用者使用鼠标操作的形式控制视角移动,其中鼠标左击拖动为平移地图、右击拖动为旋转(支持水平方向和垂直方向旋转)地图、鼠标滚轮滚动为缩放地图。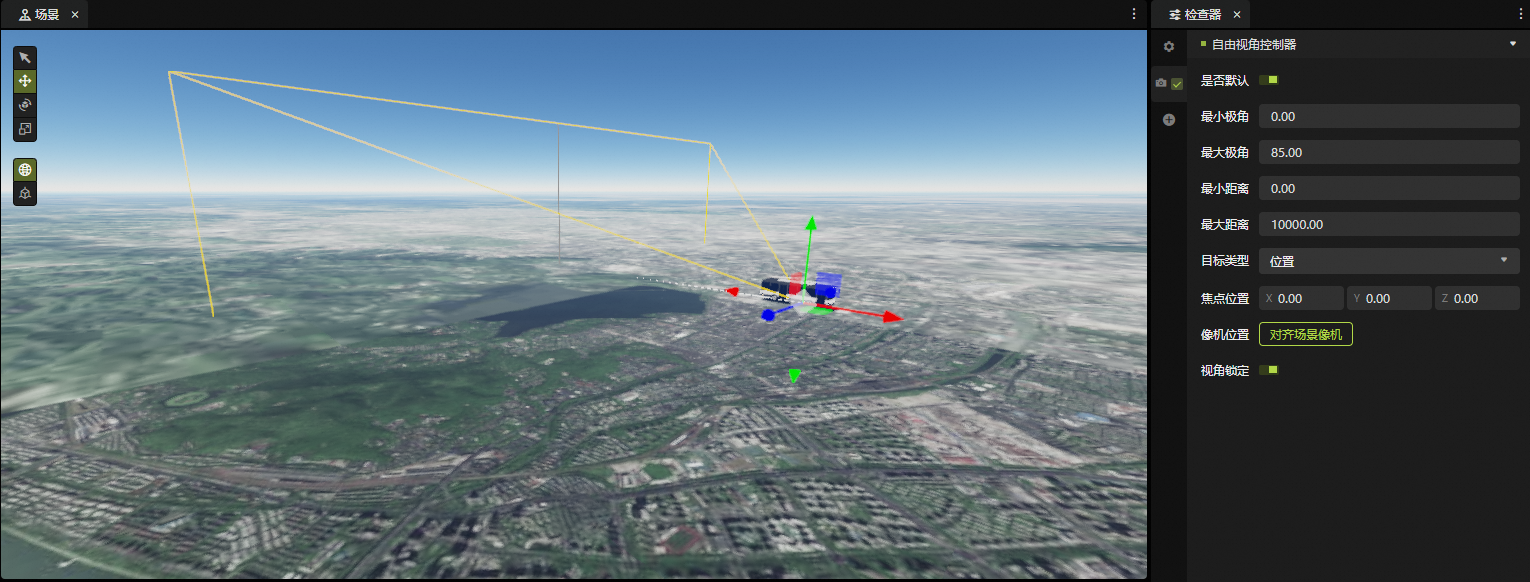
参数配置
属性 | 说明 |
是否默认 | 设置是否作为运行态默认相机。 |
最小极角 | 设置视角与海平面夹角的最小值,控制视角在垂直方向上的夹角。 |
最大极角 | 设置视角与海平面夹角的最大值,控制视角在垂直方向上的夹角。 |
最小距离 | 设置视角距离聚焦中心点的最小距离。 |
最大距离 | 设置视角距离聚焦中心点的最大距离。 |
目标类型 | 设置初始化视角下聚焦中心点的类型,包括对象和位置。 |
焦点位置 | 当目标类型为位置时显示,可以自行设置聚焦中心点的笛卡尔坐标值或者点击对齐场景像机。 |
焦点目标 | 当目标类型为对象时,可以设置场景中已有对象的位置作为聚焦中心点。 |
相机位置 | 单击对齐场景相机,控制器会自动设置当前聚焦中心点作为聚焦位置,并记录当前相机位置朝向作为初始化视角。 |
视角锁定 | 默认为关闭,当打开时,自由视角控制摄像机不可通过鼠标操作控制视角移动。 |
角色控制摄像机
仅在平面项目中有效。
应用场景
角色控制器摄像机会自动在物理世界里创建一个基于胶囊形状的碰撞体,用户可以通过设置胶囊的高度和半径来定义碰撞体的尺寸。角色不会穿过其他碰撞体,可以顺利爬上倾斜度不高的斜坡碰撞体,但会在遇到倾斜度较大的斜坡时停止移动(被阻挡)。用户可以设置角色控制器可跨越的斜坡倾斜度。
参数配置
属性 | 说明 |
是否默认 | 设置是否作为运行态默认相机。 |
高度 | 设置圆柱体的高度。 |
半径 | 设置圆柱体的半径。 |
最小位移 | 设置相机的最小位移大小。 |
最大坡度 | 设置相机的最大位移大小。 |
移动速度 | 设置相机的移动速度。 |
旋转灵敏度 | 设置相机的旋转灵敏度。 |
第三人称视角 | 设置是否默认作为第三人称视角。 |
最小极角 | 设置视角与海平面夹角的最小值,控制视角在垂直方向上的夹角。 |
最大极角 | 设置视角与海平面夹角的最大值,控制视角在垂直方向上的夹角。 |
最小距离 | 设置视角距离聚焦中心点的最小距离。 |
最大距离 | 设置视角距离聚焦中心点的最大距离。 |
交互功能
用户可以通过按键WASD控制胶囊角色的移动。
用户可以通过鼠标的左右键控制相机的朝向。
【第三视角下】用户可以通过鼠标的中间滑动键控制相机和胶囊体之间的距离。
角色尺寸设置
角色的外形用胶囊模拟,相当于上下两个半球加上中间的圆柱体。可以设置圆柱体的高度、半径和半球的半径,单位是米。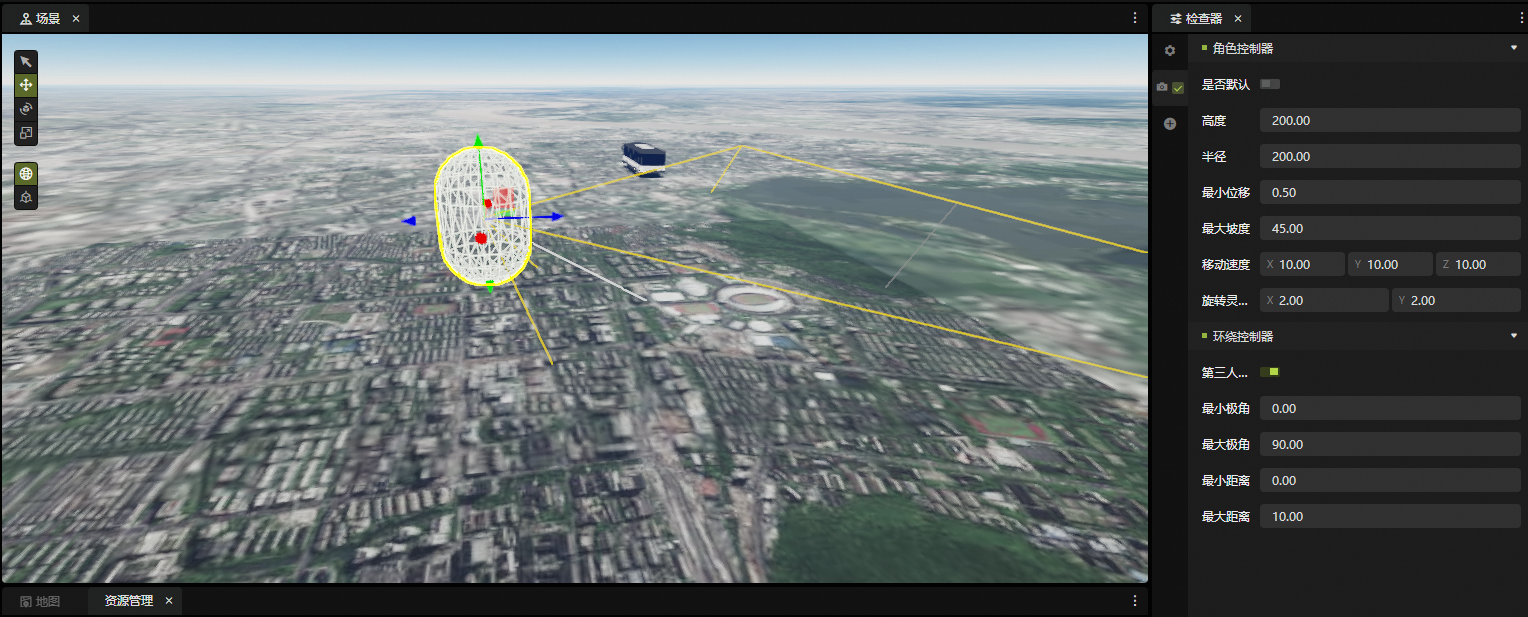
相机视角模式
第一视角
模拟相机固定在胶囊体,相机会跟随胶囊体的移动和转向。
第三视角
模拟相机在胶囊体后方注视胶囊体的情形,此时移动鼠标会使相机绕着胶囊体转动。